Feature represents the base feature class. More...
#include <pcl/features/feature.h>
 Inheritance diagram for pcl::Feature< PointInT, PointOutT >:
Inheritance diagram for pcl::Feature< PointInT, PointOutT >: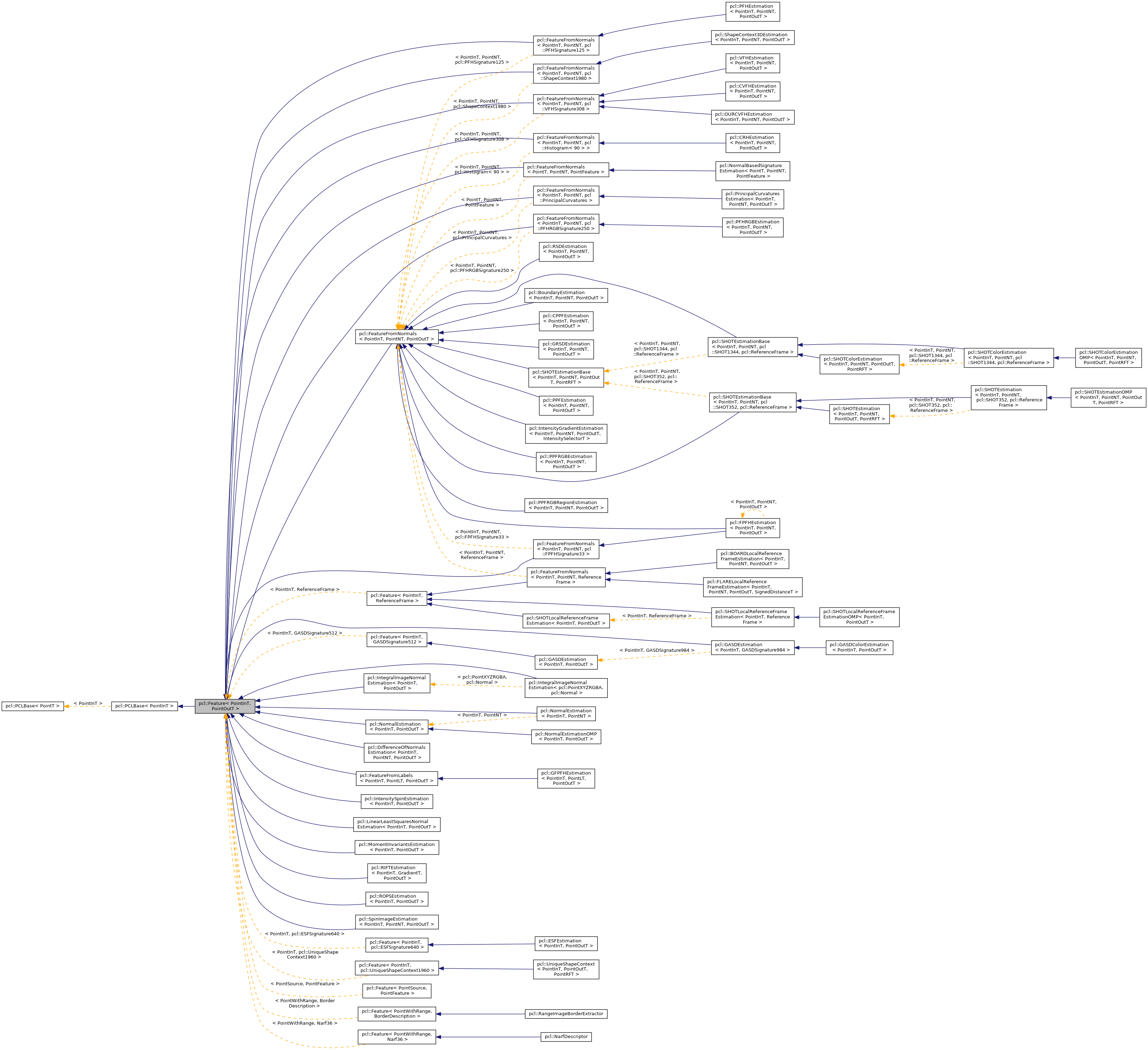 Collaboration diagram for pcl::Feature< PointInT, PointOutT >:
Collaboration diagram for pcl::Feature< PointInT, PointOutT >: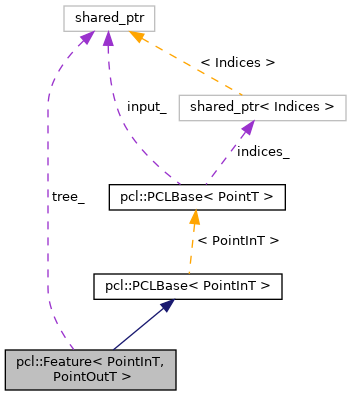
Public Types | |
| using | BaseClass = PCLBase< PointInT > |
| using | Ptr = shared_ptr< Feature< PointInT, PointOutT > > |
| using | ConstPtr = shared_ptr< const Feature< PointInT, PointOutT > > |
| using | KdTree = pcl::search::Search< PointInT > |
| using | KdTreePtr = typename KdTree::Ptr |
| using | PointCloudIn = pcl::PointCloud< PointInT > |
| using | PointCloudInPtr = typename PointCloudIn::Ptr |
| using | PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
| using | PointCloudOut = pcl::PointCloud< PointOutT > |
| using | SearchMethod = std::function< int(std::size_t, double, pcl::Indices &, std::vector< float > &)> |
| using | SearchMethodSurface = std::function< int(const PointCloudIn &cloud, std::size_t index, double, pcl::Indices &, std::vector< float > &)> |
| Public Types inherited from pcl::PCLBase< PointInT > | |
| using | PointCloud = pcl::PointCloud< PointInT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| Feature () | |
| Empty constructor. | |
| void | setSearchSurface (const PointCloudInConstPtr &cloud) |
| Provide a pointer to a dataset to add additional information to estimate the features for every point in the input dataset. | |
| PointCloudInConstPtr | getSearchSurface () const |
| Get a pointer to the surface point cloud dataset. | |
| void | setSearchMethod (const KdTreePtr &tree) |
| Provide a pointer to the search object. | |
| KdTreePtr | getSearchMethod () const |
| Get a pointer to the search method used. | |
| double | getSearchParameter () const |
| Get the internal search parameter. | |
| void | setKSearch (int k) |
| Set the number of k nearest neighbors to use for the feature estimation. | |
| int | getKSearch () const |
| get the number of k nearest neighbors used for the feature estimation. | |
| void | setRadiusSearch (double radius) |
| Set the sphere radius that is to be used for determining the nearest neighbors used for the feature estimation. | |
| double | getRadiusSearch () const |
| Get the sphere radius used for determining the neighbors. | |
| void | compute (PointCloudOut &output) |
| Base method for feature estimation for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
| Public Member Functions inherited from pcl::PCLBase< PointInT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointInT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| const std::string & | getClassName () const |
| Get a string representation of the name of this class. | |
| virtual bool | initCompute () |
| This method should get called before starting the actual computation. | |
| virtual bool | deinitCompute () |
| This method should get called after ending the actual computation. | |
| int | searchForNeighbors (std::size_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface. | |
| int | searchForNeighbors (const PointCloudIn &cloud, std::size_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface. | |
| Protected Member Functions inherited from pcl::PCLBase< PointInT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Protected Attributes | |
| std::string | feature_name_ |
| The feature name. | |
| SearchMethodSurface | search_method_surface_ |
| The search method template for points. | |
| PointCloudInConstPtr | surface_ |
| An input point cloud describing the surface that is to be used for nearest neighbors estimation. | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
| double | search_parameter_ |
| The actual search parameter (from either search_radius_ or k_). | |
| double | search_radius_ |
| The nearest neighbors search radius for each point. | |
| int | k_ |
| The number of K nearest neighbors to use for each point. | |
| bool | fake_surface_ |
| If no surface is given, we use the input PointCloud as the surface. | |
| Protected Attributes inherited from pcl::PCLBase< PointInT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::Feature< PointInT, PointOutT >
Feature represents the base feature class.
Some generic 3D operations that are applicable to all features are defined here as static methods.
- Attention
- The convention for a feature descriptor is:
- if the nearest neighbors for the query point at which the descriptor is to be computed cannot be determined, the descriptor values will be set to NaN (not a number)
- it is impossible to estimate a feature descriptor for a point that doesn't have finite 3D coordinates. Therefore, any point that has NaN data on x, y, or z, will most likely have its descriptor set to NaN.
Member Typedef Documentation
◆ BaseClass
| using pcl::Feature< PointInT, PointOutT >::BaseClass = PCLBase<PointInT> |
◆ ConstPtr
| using pcl::Feature< PointInT, PointOutT >::ConstPtr = shared_ptr< const Feature<PointInT, PointOutT> > |
◆ KdTree
| using pcl::Feature< PointInT, PointOutT >::KdTree = pcl::search::Search<PointInT> |
◆ KdTreePtr
| using pcl::Feature< PointInT, PointOutT >::KdTreePtr = typename KdTree::Ptr |
◆ PointCloudIn
| using pcl::Feature< PointInT, PointOutT >::PointCloudIn = pcl::PointCloud<PointInT> |
◆ PointCloudInConstPtr
| using pcl::Feature< PointInT, PointOutT >::PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
◆ PointCloudInPtr
| using pcl::Feature< PointInT, PointOutT >::PointCloudInPtr = typename PointCloudIn::Ptr |
◆ PointCloudOut
| using pcl::Feature< PointInT, PointOutT >::PointCloudOut = pcl::PointCloud<PointOutT> |
◆ Ptr
| using pcl::Feature< PointInT, PointOutT >::Ptr = shared_ptr< Feature<PointInT, PointOutT> > |
◆ SearchMethod
| using pcl::Feature< PointInT, PointOutT >::SearchMethod = std::function<int (std::size_t, double, pcl::Indices &, std::vector<float> &)> |
◆ SearchMethodSurface
| using pcl::Feature< PointInT, PointOutT >::SearchMethodSurface = std::function<int (const PointCloudIn &cloud, std::size_t index, double, pcl::Indices &, std::vector<float> &)> |
Constructor & Destructor Documentation
◆ Feature()
|
inline |
Member Function Documentation
◆ compute()
| void pcl::Feature< PointInT, PointOutT >::compute | ( | PointCloudOut & | output | ) |
Base method for feature estimation for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
- Parameters
-
[out] output the resultant point cloud model dataset containing the estimated features
Definition at line 195 of file feature.hpp.
References pcl::PointCloud< PointT >::clear(), pcl::PointCloud< PointT >::header, pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::resize(), pcl::PointCloud< PointT >::size(), and pcl::PointCloud< PointT >::width.
Referenced by pcl::GRSDEstimation< PointInT, PointNT, PointOutT >::computeFeature(), pcl::UnaryClassifier< PointT >::computeFPFH(), pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >::computeRf(), pcl::SurfaceNormalModality< PointInT >::computeSurfaceNormals(), pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::detectKeypoints(), pcl::gpu::DataSource::estimateNormals(), pcl::HarrisKeypoint3D< PointInT, PointOutT, NormalT >::initCompute(), pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::initCompute(), pcl::SUSANKeypoint< PointInT, PointOutT, NormalT, IntensityT >::initCompute(), and pcl::TrajkovicKeypoint3D< PointInT, PointOutT, NormalT >::initCompute().
◆ deinitCompute()
|
protectedvirtual |
This method should get called after ending the actual computation.
Reimplemented in pcl::FLARELocalReferenceFrameEstimation< PointInT, PointNT, PointOutT, SignedDistanceT >.
Definition at line 182 of file feature.hpp.
Referenced by pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >::initCompute(), pcl::FeatureFromLabels< PointInT, PointLT, PointOutT >::initCompute(), and pcl::SpinImageEstimation< PointInT, PointNT, PointOutT >::initCompute().
◆ getClassName()
|
inlineprotected |
Get a string representation of the name of this class.
Definition at line 244 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::feature_name_.
Referenced by pcl::RSDEstimation< PointInT, PointNT, PointOutT >::setKSearch().
◆ getKSearch()
|
inline |
get the number of k nearest neighbors used for the feature estimation.
Definition at line 188 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::k_.
◆ getRadiusSearch()
|
inline |
Get the sphere radius used for determining the neighbors.
Definition at line 205 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::search_radius_.
◆ getSearchMethod()
|
inline |
Get a pointer to the search method used.
Definition at line 168 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::tree_.
◆ getSearchParameter()
|
inline |
Get the internal search parameter.
Definition at line 175 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::search_parameter_.
◆ getSearchSurface()
|
inline |
Get a pointer to the surface point cloud dataset.
Definition at line 155 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::surface_.
◆ initCompute()
|
protectedvirtual |
This method should get called before starting the actual computation.
Reimplemented in pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >, pcl::FeatureFromNormals< PointInT, PointNT, pcl::FPFHSignature33 >, pcl::FeatureFromNormals< PointInT, PointNT, pcl::Histogram< 90 > >, pcl::FeatureFromNormals< PointInT, PointNT, pcl::PFHRGBSignature250 >, pcl::FeatureFromNormals< PointInT, PointNT, pcl::PFHSignature125 >, pcl::FeatureFromNormals< PointInT, PointNT, pcl::PrincipalCurvatures >, pcl::FeatureFromNormals< PointInT, PointNT, pcl::ShapeContext1980 >, pcl::FeatureFromNormals< PointInT, PointNT, pcl::SHOT1344 >, pcl::FeatureFromNormals< PointInT, PointNT, pcl::SHOT352 >, pcl::FeatureFromNormals< PointInT, PointNT, pcl::VFHSignature308 >, pcl::FeatureFromNormals< PointInT, PointNT, ReferenceFrame >, pcl::FeatureFromNormals< PointT, PointNT, PointFeature >, pcl::FeatureFromLabels< PointInT, PointLT, PointOutT >, pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >, pcl::DifferenceOfNormalsEstimation< PointInT, PointNT, PointOutT >, pcl::FLARELocalReferenceFrameEstimation< PointInT, PointNT, PointOutT, SignedDistanceT >, pcl::SHOTEstimationBase< PointInT, PointNT, PointOutT, PointRFT >, pcl::SHOTEstimationBase< PointInT, PointNT, pcl::SHOT1344, pcl::ReferenceFrame >, pcl::SHOTEstimationBase< PointInT, PointNT, pcl::SHOT352, pcl::ReferenceFrame >, pcl::SHOTEstimationOMP< PointInT, PointNT, PointOutT, PointRFT >, pcl::SHOTColorEstimationOMP< PointInT, PointNT, PointOutT, PointRFT >, pcl::SpinImageEstimation< PointInT, PointNT, PointOutT >, pcl::UniqueShapeContext< PointInT, PointOutT, PointRFT >, and pcl::VFHEstimation< PointInT, PointNT, PointOutT >.
Definition at line 95 of file feature.hpp.
◆ searchForNeighbors() [1/2]
|
inlineprotected |
Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface.
- Parameters
-
[in] cloud the query point cloud [in] index the index of the query point in cloud [in] parameter the search parameter (either k or radius) [out] indices the resultant vector of indices representing the k-nearest neighbors [out] distances the resultant vector of distances representing the distances from the query point to the k-nearest neighbors
- Returns
- the number of neighbors found. If no neighbors are found or an error occurred, return 0.
Definition at line 286 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::search_method_surface_.
◆ searchForNeighbors() [2/2]
|
inlineprotected |
Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface.
- Parameters
-
[in] index the index of the query point [in] parameter the search parameter (either k or radius) [out] indices the resultant vector of indices representing the k-nearest neighbors [out] distances the resultant vector of distances representing the distances from the query point to the k-nearest neighbors
- Returns
- the number of neighbors found. If no neighbors are found or an error occurred, return 0.
Definition at line 268 of file feature.h.
References pcl::PCLBase< PointInT >::input_, and pcl::Feature< PointInT, PointOutT >::search_method_surface_.
◆ setKSearch()
|
inline |
Set the number of k nearest neighbors to use for the feature estimation.
- Parameters
-
[in] k the number of k-nearest neighbors
Definition at line 184 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::k_.
Referenced by pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >::computeRf(), and pcl::gpu::DataSource::estimateNormals().
◆ setRadiusSearch()
|
inline |
Set the sphere radius that is to be used for determining the nearest neighbors used for the feature estimation.
- Parameters
-
[in] radius the sphere radius used as the maximum distance to consider a point a neighbor
Definition at line 198 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::search_radius_.
Referenced by pcl::GRSDEstimation< PointInT, PointNT, PointOutT >::computeFeature(), pcl::UnaryClassifier< PointT >::computeFPFH(), pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >::computeRf(), pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::detectKeypoints(), pcl::SHOTEstimationOMP< PointInT, PointNT, PointOutT, PointRFT >::initCompute(), pcl::SHOTColorEstimationOMP< PointInT, PointNT, PointOutT, PointRFT >::initCompute(), pcl::UniqueShapeContext< PointInT, PointOutT, PointRFT >::initCompute(), pcl::HarrisKeypoint3D< PointInT, PointOutT, NormalT >::initCompute(), pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::initCompute(), and pcl::SUSANKeypoint< PointInT, PointOutT, NormalT, IntensityT >::initCompute().
◆ setSearchMethod()
|
inline |
Provide a pointer to the search object.
- Parameters
-
[in] tree a pointer to the spatial search object.
Definition at line 164 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::tree_.
Referenced by pcl::UnaryClassifier< PointT >::computeFPFH(), and pcl::gpu::DataSource::estimateNormals().
◆ setSearchSurface()
|
inline |
Provide a pointer to a dataset to add additional information to estimate the features for every point in the input dataset.
This is optional, if this is not set, it will only use the data in the input cloud to estimate the features. This is useful when you only need to compute the features for a downsampled cloud.
- Parameters
-
[in] cloud a pointer to a PointCloud message
Definition at line 146 of file feature.h.
References pcl::Feature< PointInT, PointOutT >::fake_surface_, and pcl::Feature< PointInT, PointOutT >::surface_.
Referenced by pcl::GRSDEstimation< PointInT, PointNT, PointOutT >::computeFeature(), pcl::SHOTEstimationOMP< PointInT, PointNT, PointOutT, PointRFT >::initCompute(), pcl::SHOTColorEstimationOMP< PointInT, PointNT, PointOutT, PointRFT >::initCompute(), and pcl::UniqueShapeContext< PointInT, PointOutT, PointRFT >::initCompute().
Member Data Documentation
◆ fake_surface_
|
protected |
If no surface is given, we use the input PointCloud as the surface.
Definition at line 255 of file feature.h.
Referenced by pcl::Feature< PointInT, PointOutT >::setSearchSurface().
◆ feature_name_
|
protected |
The feature name.
Definition at line 220 of file feature.h.
Referenced by pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::BOARDLocalReferenceFrameEstimation(), pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::BoundaryEstimation(), pcl::CPPFEstimation< PointInT, PointNT, PointOutT >::CPPFEstimation(), pcl::CRHEstimation< PointInT, PointNT, PointOutT >::CRHEstimation(), pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::CVFHEstimation(), pcl::DifferenceOfNormalsEstimation< PointInT, PointNT, PointOutT >::DifferenceOfNormalsEstimation(), pcl::ESFEstimation< PointInT, PointOutT >::ESFEstimation(), pcl::FLARELocalReferenceFrameEstimation< PointInT, PointNT, PointOutT, SignedDistanceT >::FLARELocalReferenceFrameEstimation(), pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::FPFHEstimation(), pcl::FPFHEstimationOMP< PointInT, PointNT, PointOutT >::FPFHEstimationOMP(), pcl::GASDColorEstimation< PointInT, PointOutT >::GASDColorEstimation(), pcl::GASDEstimation< PointInT, PointOutT >::GASDEstimation(), pcl::Feature< PointInT, PointOutT >::getClassName(), pcl::GFPFHEstimation< PointInT, PointLT, PointOutT >::GFPFHEstimation(), pcl::GRSDEstimation< PointInT, PointNT, PointOutT >::GRSDEstimation(), pcl::IntegralImageNormalEstimation< PointInT, PointOutT >::IntegralImageNormalEstimation(), pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >::IntensityGradientEstimation(), pcl::IntensitySpinEstimation< PointInT, PointOutT >::IntensitySpinEstimation(), pcl::LinearLeastSquaresNormalEstimation< PointInT, PointOutT >::LinearLeastSquaresNormalEstimation(), pcl::MomentInvariantsEstimation< PointInT, PointOutT >::MomentInvariantsEstimation(), pcl::NormalEstimation< PointInT, PointOutT >::NormalEstimation(), pcl::NormalEstimationOMP< PointInT, PointOutT >::NormalEstimationOMP(), pcl::OURCVFHEstimation< PointInT, PointNT, PointOutT >::OURCVFHEstimation(), pcl::PFHEstimation< PointInT, PointNT, PointOutT >::PFHEstimation(), pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::PFHRGBEstimation(), pcl::PPFEstimation< PointInT, PointNT, PointOutT >::PPFEstimation(), pcl::PPFRGBEstimation< PointInT, PointNT, PointOutT >::PPFRGBEstimation(), pcl::PPFRGBRegionEstimation< PointInT, PointNT, PointOutT >::PPFRGBRegionEstimation(), pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::PrincipalCurvaturesEstimation(), pcl::RIFTEstimation< PointInT, GradientT, PointOutT >::RIFTEstimation(), pcl::RSDEstimation< PointInT, PointNT, PointOutT >::RSDEstimation(), pcl::IntegralImageNormalEstimation< PointInT, PointOutT >::setNormalSmoothingSize(), pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::ShapeContext3DEstimation(), pcl::SHOTColorEstimation< PointInT, PointNT, PointOutT, PointRFT >::SHOTColorEstimation(), pcl::SHOTEstimation< PointInT, PointNT, PointOutT, PointRFT >::SHOTEstimation(), pcl::SHOTEstimationBase< PointInT, PointNT, PointOutT, PointRFT >::SHOTEstimationBase(), pcl::SHOTLocalReferenceFrameEstimation< PointInT, PointOutT >::SHOTLocalReferenceFrameEstimation(), pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >::SHOTLocalReferenceFrameEstimationOMP(), pcl::SpinImageEstimation< PointInT, PointNT, PointOutT >::SpinImageEstimation(), and pcl::UniqueShapeContext< PointInT, PointOutT, PointRFT >::UniqueShapeContext().
◆ k_
|
protected |
The number of K nearest neighbors to use for each point.
Definition at line 240 of file feature.h.
Referenced by pcl::CRHEstimation< PointInT, PointNT, PointOutT >::CRHEstimation(), pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::CVFHEstimation(), pcl::ESFEstimation< PointInT, PointOutT >::ESFEstimation(), pcl::FeatureFromLabels< PointInT, PointLT, PointOutT >::FeatureFromLabels(), pcl::GASDEstimation< PointInT, PointOutT >::GASDEstimation(), pcl::Feature< PointInT, PointOutT >::getKSearch(), pcl::IntegralImageNormalEstimation< PointInT, PointOutT >::IntegralImageNormalEstimation(), pcl::LinearLeastSquaresNormalEstimation< PointInT, PointOutT >::LinearLeastSquaresNormalEstimation(), pcl::OURCVFHEstimation< PointInT, PointNT, PointOutT >::OURCVFHEstimation(), and pcl::Feature< PointInT, PointOutT >::setKSearch().
◆ search_method_surface_
|
protected |
The search method template for points.
Definition at line 223 of file feature.h.
Referenced by pcl::Feature< PointInT, PointOutT >::searchForNeighbors(), and pcl::Feature< PointInT, PointOutT >::searchForNeighbors().
◆ search_parameter_
|
protected |
The actual search parameter (from either search_radius_ or k_).
Definition at line 234 of file feature.h.
Referenced by pcl::Feature< PointInT, PointOutT >::getSearchParameter().
◆ search_radius_
|
protected |
The nearest neighbors search radius for each point.
Definition at line 237 of file feature.h.
Referenced by pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::CVFHEstimation(), pcl::ESFEstimation< PointInT, PointOutT >::ESFEstimation(), pcl::GASDEstimation< PointInT, PointOutT >::GASDEstimation(), pcl::Feature< PointInT, PointOutT >::getRadiusSearch(), pcl::GRSDEstimation< PointInT, PointNT, PointOutT >::getRadiusSearch(), pcl::OURCVFHEstimation< PointInT, PointNT, PointOutT >::OURCVFHEstimation(), pcl::Feature< PointInT, PointOutT >::setRadiusSearch(), pcl::GRSDEstimation< PointInT, PointNT, PointOutT >::setRadiusSearch(), pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT >::ShapeContext3DEstimation(), and pcl::UniqueShapeContext< PointInT, PointOutT, PointRFT >::UniqueShapeContext().
◆ surface_
|
protected |
An input point cloud describing the surface that is to be used for nearest neighbors estimation.
Definition at line 228 of file feature.h.
Referenced by pcl::Feature< PointInT, PointOutT >::getSearchSurface(), and pcl::Feature< PointInT, PointOutT >::setSearchSurface().
◆ tree_
|
protected |
A pointer to the spatial search object.
Definition at line 231 of file feature.h.
Referenced by pcl::Feature< PointInT, PointOutT >::getSearchMethod(), pcl::IntegralImageNormalEstimation< PointInT, PointOutT >::IntegralImageNormalEstimation(), pcl::LinearLeastSquaresNormalEstimation< PointInT, PointOutT >::LinearLeastSquaresNormalEstimation(), and pcl::Feature< PointInT, PointOutT >::setSearchMethod().
The documentation for this class was generated from the following files:
- pcl/features/feature.h
- pcl/features/impl/feature.hpp