PCL base class. More...
#include <pcl/pcl_base.h>
 Inheritance diagram for pcl::PCLBase< PointT >:
Inheritance diagram for pcl::PCLBase< PointT >: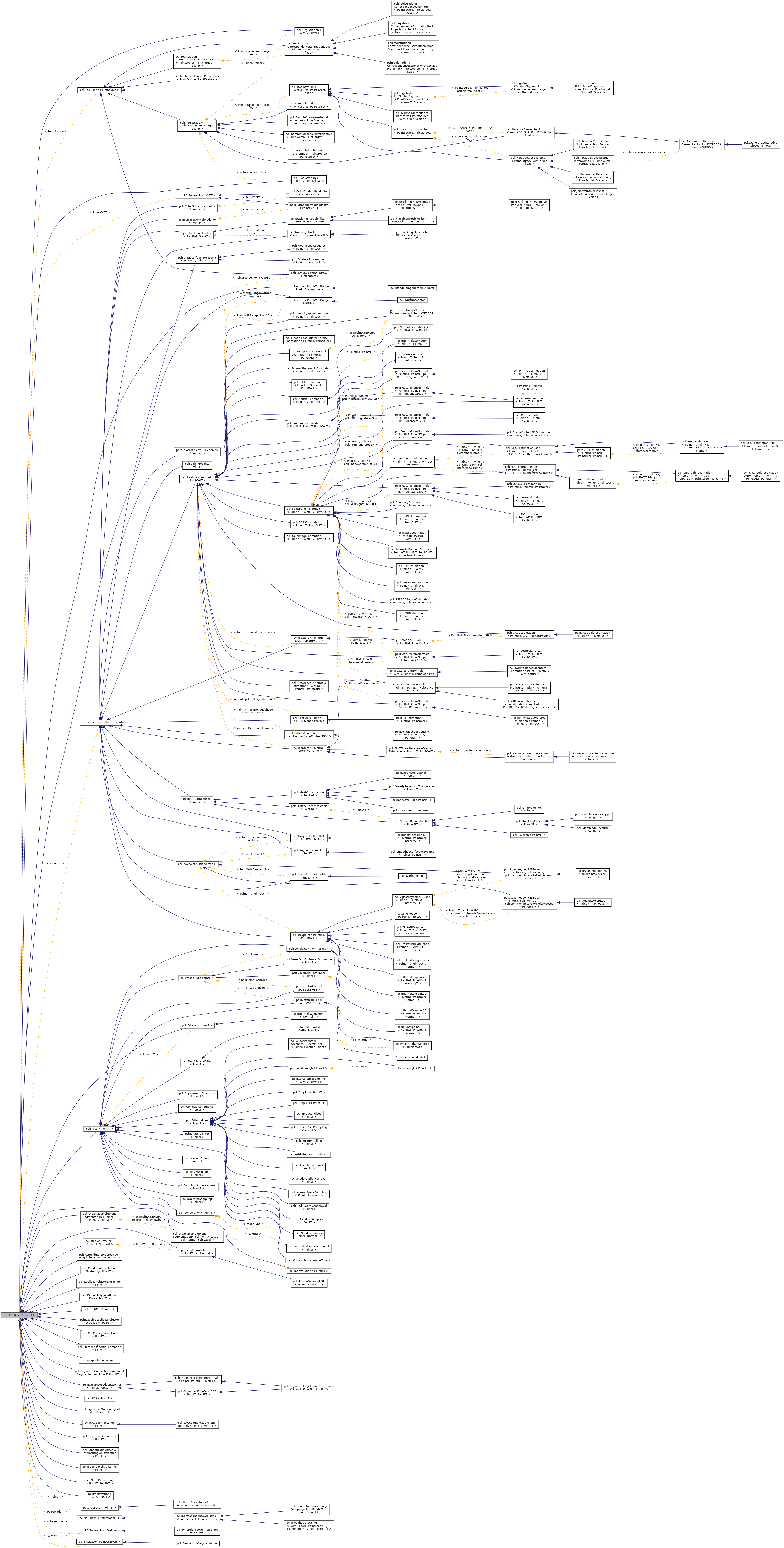 Collaboration diagram for pcl::PCLBase< PointT >:
Collaboration diagram for pcl::PCLBase< PointT >: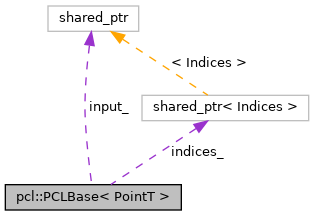
Public Types | |
| using | PointCloud = pcl::PointCloud< PointT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Protected Attributes | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::PCLBase< PointT >
PCL base class.
Implements methods that are used by most PCL algorithms.
Definition at line 69 of file pcl_base.h.
Member Typedef Documentation
◆ PointCloud
| using pcl::PCLBase< PointT >::PointCloud = pcl::PointCloud<PointT> |
Definition at line 72 of file pcl_base.h.
◆ PointCloudConstPtr
| using pcl::PCLBase< PointT >::PointCloudConstPtr = typename PointCloud::ConstPtr |
Definition at line 74 of file pcl_base.h.
◆ PointCloudPtr
| using pcl::PCLBase< PointT >::PointCloudPtr = typename PointCloud::Ptr |
Definition at line 73 of file pcl_base.h.
◆ PointIndicesConstPtr
| using pcl::PCLBase< PointT >::PointIndicesConstPtr = PointIndices::ConstPtr |
Definition at line 77 of file pcl_base.h.
◆ PointIndicesPtr
| using pcl::PCLBase< PointT >::PointIndicesPtr = PointIndices::Ptr |
Definition at line 76 of file pcl_base.h.
Constructor & Destructor Documentation
◆ PCLBase() [1/2]
| pcl::PCLBase< PointT >::PCLBase | ( | ) |
Empty constructor.
Definition at line 46 of file pcl_base.hpp.
◆ PCLBase() [2/2]
| pcl::PCLBase< PointT >::PCLBase | ( | const PCLBase< PointT > & | base | ) |
Copy constructor.
Definition at line 55 of file pcl_base.hpp.
◆ ~PCLBase()
|
virtualdefault |
Destructor.
Member Function Documentation
◆ deinitCompute()
|
protected |
This method should get called after finishing the actual computation.
Definition at line 175 of file pcl_base.hpp.
Referenced by pcl::FilterIndices< PointT >::filter(), and pcl::Filter< PointT >::filter().
◆ getIndices() [1/2]
|
inline |
Get a pointer to the vector of indices used.
Definition at line 129 of file pcl_base.h.
References pcl::PCLBase< PointT >::indices_.
◆ getIndices() [2/2]
|
inline |
Get a pointer to the vector of indices used.
Definition at line 133 of file pcl_base.h.
References pcl::PCLBase< PointT >::indices_.
◆ getInputCloud()
|
inline |
Get a pointer to the input point cloud dataset.
Definition at line 96 of file pcl_base.h.
References pcl::PCLBase< PointT >::input_.
◆ initCompute()
|
protected |
This method should get called before starting the actual computation.
Internally, initCompute() does the following:
- checks if an input dataset is given, and returns false otherwise
- checks whether a set of input indices has been given. Returns true if yes.
- if no input indices have been given, a fake set is created, which will be used until:
- either a new set is given via setIndices(), or
- a new cloud is given that has a different set of points. This will trigger an update on the set of fake indices
Definition at line 138 of file pcl_base.hpp.
Referenced by pcl::FilterIndices< PointT >::filter(), and pcl::Filter< PointT >::filter().
◆ operator[]()
|
inline |
Override PointCloud operator[] to shorten code.
- Note
- this method can be called instead of (*input_)[(*indices_)[pos]] or (*input_)[(*indices_)[pos]]
- Parameters
-
[in] pos position in indices_ vector
Definition at line 140 of file pcl_base.h.
References pcl::PCLBase< PointT >::indices_, and pcl::PCLBase< PointT >::input_.
◆ setIndices() [1/4]
|
virtual |
Provide a pointer to the vector of indices that represents the input data.
- Parameters
-
[in] indices a pointer to the indices that represent the input data.
Reimplemented in pcl::PCA< PointT >, and pcl::MomentOfInertiaEstimation< PointT >.
Definition at line 81 of file pcl_base.hpp.
◆ setIndices() [2/4]
|
virtual |
Provide a pointer to the vector of indices that represents the input data.
- Parameters
-
[in] indices a pointer to the indices that represent the input data.
Reimplemented in pcl::PCA< PointT >, and pcl::MomentOfInertiaEstimation< PointT >.
Definition at line 72 of file pcl_base.hpp.
Referenced by pcl::outofcore::OutofcoreOctreeBaseNode< ContainerT, PointT >::addPointCloud_and_genLOD(), pcl::people::GroundBasedPeopleDetectionApp< PointT >::compute(), pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::initCompute(), pcl::SHOTEstimationOMP< PointInT, PointNT, PointOutT, PointRFT >::initCompute(), pcl::SHOTColorEstimationOMP< PointInT, PointNT, PointOutT, PointRFT >::initCompute(), pcl::UniqueShapeContext< PointInT, PointOutT, PointRFT >::initCompute(), pcl::registration::KFPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::initCompute(), pcl::outofcore::OutofcoreOctreeBaseNode< ContainerT, PointT >::queryBBIncludes_subsample(), pcl::PCA< PointT >::setIndices(), pcl::MomentOfInertiaEstimation< PointT >::setIndices(), pcl::PCA< PointT >::setIndices(), pcl::MomentOfInertiaEstimation< PointT >::setIndices(), pcl::PCA< PointT >::setIndices(), pcl::MomentOfInertiaEstimation< PointT >::setIndices(), pcl::PCA< PointT >::setIndices(), pcl::MomentOfInertiaEstimation< PointT >::setIndices(), and pcl::ism::ImplicitShapeModelEstimation< FeatureSize, PointT, NormalT >::simplifyCloud().
◆ setIndices() [3/4]
|
virtual |
Provide a pointer to the vector of indices that represents the input data.
- Parameters
-
[in] indices a pointer to the indices that represent the input data.
Reimplemented in pcl::PCA< PointT >, and pcl::MomentOfInertiaEstimation< PointT >.
Definition at line 90 of file pcl_base.hpp.
◆ setIndices() [4/4]
|
virtual |
Set the indices for the points laying within an interest region of the point cloud.
- Note
- you shouldn't call this method on unorganized point clouds!
- Parameters
-
[in] row_start the offset on rows [in] col_start the offset on columns [in] nb_rows the number of rows to be considered row_start included [in] nb_cols the number of columns to be considered col_start included
Reimplemented in pcl::PCA< PointT >, and pcl::MomentOfInertiaEstimation< PointT >.
Definition at line 99 of file pcl_base.hpp.
◆ setInputCloud()
|
virtual |
Provide a pointer to the input dataset.
- Parameters
-
[in] cloud the const boost shared pointer to a PointCloud message
Reimplemented in pcl::PCA< PointT >, pcl::PCA< PointT >, pcl::MomentOfInertiaEstimation< PointT >, pcl::NormalEstimation< PointInT, PointOutT >, pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >, pcl::GrabCut< PointT >, and pcl::MinCutSegmentation< PointT >.
Definition at line 65 of file pcl_base.hpp.
Referenced by pcl::outofcore::OutofcoreOctreeBaseNode< ContainerT, PointT >::addPointCloud_and_genLOD(), pcl::LocalMaximum< PointT >::applyFilterIndices(), pcl::people::GroundBasedPeopleDetectionApp< PointT >::compute(), pcl::GRSDEstimation< PointInT, PointNT, PointOutT >::computeFeature(), pcl::UnaryClassifier< PointT >::computeFPFH(), pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >::computeRf(), pcl::CrfSegmentation< PointT >::createVoxelGrid(), pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::detectKeypoints(), pcl::SIFTKeypoint< PointInT, PointOutT >::detectKeypoints(), pcl::people::GroundBasedPeopleDetectionApp< PointT >::filter(), pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::getBoundaryPoints(), pcl::kinfuLS::WorldModel< PointT >::getExistingData(), pcl::NormalDistributionsTransform< PointSource, PointTarget, Scalar >::init(), pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::initCompute(), pcl::SHOTEstimationOMP< PointInT, PointNT, PointOutT, PointRFT >::initCompute(), pcl::SHOTColorEstimationOMP< PointInT, PointNT, PointOutT, PointRFT >::initCompute(), pcl::UniqueShapeContext< PointInT, PointOutT, PointRFT >::initCompute(), pcl::registration::KFPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::initCompute(), pcl::outofcore::OutofcoreOctreeBaseNode< ContainerT, PointT >::queryBBIncludes_subsample(), pcl::OrganizedMultiPlaneSegmentation< PointT, PointNT, PointLT >::segment(), pcl::PCA< PointT >::setInputCloud(), pcl::MomentOfInertiaEstimation< PointT >::setInputCloud(), pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >::setInputCloud(), pcl::registration::CorrespondenceEstimationBase< PointSource, PointTarget, Scalar >::setInputSource(), pcl::Registration< PointSource, PointTarget, Scalar >::setInputSource(), pcl::HypothesisVerification< ModelT, SceneT >::setSceneCloud(), pcl::kinfuLS::WorldModel< PointT >::setSliceAsNans(), and pcl::ism::ImplicitShapeModelEstimation< FeatureSize, PointT, NormalT >::simplifyCloud().
Member Data Documentation
◆ fake_indices_
|
protected |
If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud.
Definition at line 156 of file pcl_base.h.
◆ indices_
|
protected |
A pointer to the vector of point indices to use.
Definition at line 150 of file pcl_base.h.
Referenced by pcl::PCLBase< PointT >::getIndices(), pcl::PCLBase< PointT >::getIndices(), and pcl::PCLBase< PointT >::operator[]().
◆ input_
|
protected |
The input point cloud dataset.
Definition at line 147 of file pcl_base.h.
Referenced by pcl::Filter< PointT >::filter(), pcl::PCLBase< PointT >::getInputCloud(), and pcl::PCLBase< PointT >::operator[]().
◆ use_indices_
|
protected |
Set to true if point indices are used.
Definition at line 153 of file pcl_base.h.
Referenced by pcl::ExtractIndices< PointT >::ExtractIndices().
The documentation for this class was generated from the following files:
- pcl/pcl_base.h
- pcl/impl/pcl_base.hpp