Generic search class. More...
#include <pcl/search/search.h>
 Inheritance diagram for pcl::search::Search< PointT >:
Inheritance diagram for pcl::search::Search< PointT >: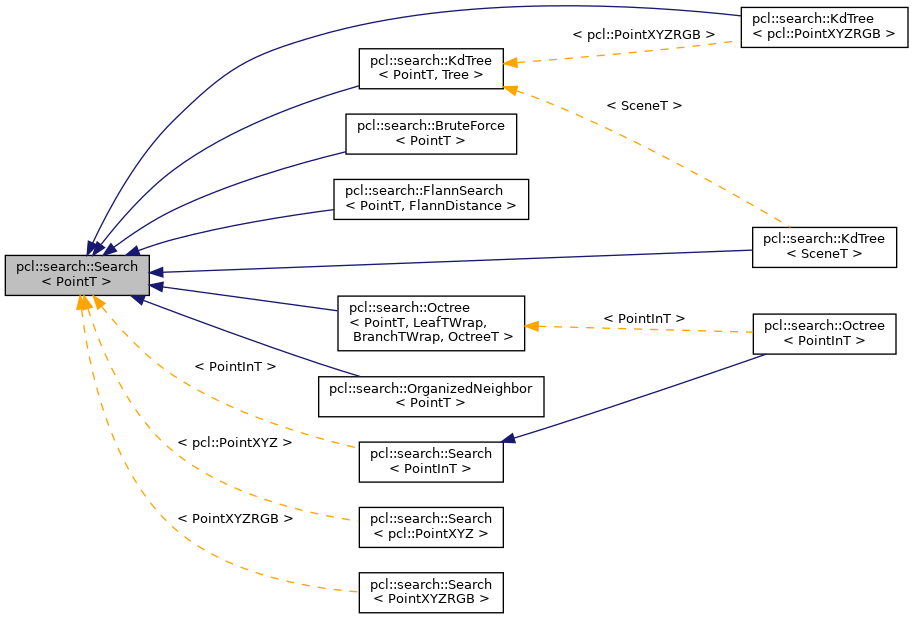 Collaboration diagram for pcl::search::Search< PointT >:
Collaboration diagram for pcl::search::Search< PointT >: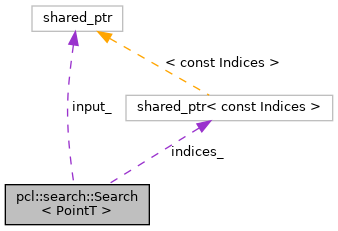
Public Types | |
| using | PointCloud = pcl::PointCloud< PointT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | Ptr = shared_ptr< pcl::search::Search< PointT > > |
| using | ConstPtr = shared_ptr< const pcl::search::Search< PointT > > |
| using | IndicesPtr = pcl::IndicesPtr |
| using | IndicesConstPtr = pcl::IndicesConstPtr |
Public Member Functions | |
| Search (const std::string &name="", bool sorted=false) | |
| Constructor. | |
| virtual | ~Search ()=default |
| Destructor. | |
| virtual const std::string & | getName () const |
| Returns the search method name. | |
| virtual void | setSortedResults (bool sorted) |
| sets whether the results should be sorted (ascending in the distance) or not | |
| virtual bool | getSortedResults () |
| Gets whether the results should be sorted (ascending in the distance) or not Otherwise the results may be returned in any order. | |
| virtual bool | setInputCloud (const PointCloudConstPtr &cloud, const IndicesConstPtr &indices=IndicesConstPtr()) |
| Pass the input dataset that the search will be performed on. | |
| virtual PointCloudConstPtr | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual IndicesConstPtr | getIndices () const |
| Get a pointer to the vector of indices used. | |
| virtual int | nearestKSearch (const PointT &point, int k, Indices &k_indices, std::vector< float > &k_sqr_distances) const =0 |
| Search for the k-nearest neighbors for the given query point. | |
| template<typename PointTDiff > | |
| int | nearestKSearchT (const PointTDiff &point, int k, Indices &k_indices, std::vector< float > &k_sqr_distances) const |
| Search for k-nearest neighbors for the given query point. | |
| virtual int | nearestKSearch (const PointCloud &cloud, index_t index, int k, Indices &k_indices, std::vector< float > &k_sqr_distances) const |
| Search for k-nearest neighbors for the given query point. | |
| virtual int | nearestKSearch (index_t index, int k, Indices &k_indices, std::vector< float > &k_sqr_distances) const |
| Search for k-nearest neighbors for the given query point (zero-copy). | |
| virtual void | nearestKSearch (const PointCloud &cloud, const Indices &indices, int k, std::vector< Indices > &k_indices, std::vector< std::vector< float > > &k_sqr_distances) const |
| Search for the k-nearest neighbors for the given query point. | |
| template<typename PointTDiff > | |
| void | nearestKSearchT (const pcl::PointCloud< PointTDiff > &cloud, const Indices &indices, int k, std::vector< Indices > &k_indices, std::vector< std::vector< float > > &k_sqr_distances) const |
| Search for the k-nearest neighbors for the given query point. | |
| virtual int | radiusSearch (const PointT &point, double radius, Indices &k_indices, std::vector< float > &k_sqr_distances, unsigned int max_nn=0) const =0 |
| Search for all the nearest neighbors of the query point in a given radius. | |
| template<typename PointTDiff > | |
| int | radiusSearchT (const PointTDiff &point, double radius, Indices &k_indices, std::vector< float > &k_sqr_distances, unsigned int max_nn=0) const |
| Search for all the nearest neighbors of the query point in a given radius. | |
| virtual int | radiusSearch (const PointCloud &cloud, index_t index, double radius, Indices &k_indices, std::vector< float > &k_sqr_distances, unsigned int max_nn=0) const |
| Search for all the nearest neighbors of the query point in a given radius. | |
| virtual int | radiusSearch (index_t index, double radius, Indices &k_indices, std::vector< float > &k_sqr_distances, unsigned int max_nn=0) const |
| Search for all the nearest neighbors of the query point in a given radius (zero-copy). | |
| virtual void | radiusSearch (const PointCloud &cloud, const Indices &indices, double radius, std::vector< Indices > &k_indices, std::vector< std::vector< float > > &k_sqr_distances, unsigned int max_nn=0) const |
| Search for all the nearest neighbors of the query point in a given radius. | |
| template<typename PointTDiff > | |
| void | radiusSearchT (const pcl::PointCloud< PointTDiff > &cloud, const Indices &indices, double radius, std::vector< Indices > &k_indices, std::vector< std::vector< float > > &k_sqr_distances, unsigned int max_nn=0) const |
| Search for all the nearest neighbors of the query points in a given radius. | |
| void | setNumberOfThreads (unsigned int nr_threads) |
| Set the number of threads to use for searching over multiple points or indices. | |
Protected Member Functions | |
| void | sortResults (Indices &indices, std::vector< float > &distances) const |
Protected Attributes | |
| PointCloudConstPtr | input_ |
| IndicesConstPtr | indices_ |
| bool | sorted_results_ |
| std::string | name_ |
| unsigned int | num_threads_ {1} |
| The number of threads to use when searching over multiple points or indices. | |
Detailed Description
class pcl::search::Search< PointT >
Generic search class.
All search wrappers must inherit from this.
Each search method must implement 2 different types of search:
- nearestKSearch - search for K-nearest neighbors.
- radiusSearch - search for all nearest neighbors in a sphere of a given radius
The input to each search method can be given in 3 different ways:
- as a query point
- as a (cloud, index) pair
- as an index
For the latter option, it is assumed that the user specified the input via a setInputCloud () method first.
- Note
- In case of an error, all methods are supposed to return 0 as the number of neighbors found.
- libpcl_search deals with three-dimensional search problems. For higher level dimensional search, please refer to the libpcl_kdtree module.
Member Typedef Documentation
◆ ConstPtr
| using pcl::search::Search< PointT >::ConstPtr = shared_ptr<const pcl::search::Search<PointT> > |
◆ IndicesConstPtr
| using pcl::search::Search< PointT >::IndicesConstPtr = pcl::IndicesConstPtr |
◆ IndicesPtr
| using pcl::search::Search< PointT >::IndicesPtr = pcl::IndicesPtr |
◆ PointCloud
| using pcl::search::Search< PointT >::PointCloud = pcl::PointCloud<PointT> |
◆ PointCloudConstPtr
| using pcl::search::Search< PointT >::PointCloudConstPtr = typename PointCloud::ConstPtr |
◆ PointCloudPtr
| using pcl::search::Search< PointT >::PointCloudPtr = typename PointCloud::Ptr |
◆ Ptr
| using pcl::search::Search< PointT >::Ptr = shared_ptr<pcl::search::Search<PointT> > |
Constructor & Destructor Documentation
◆ Search()
| pcl::search::Search< PointT >::Search | ( | const std::string & | name = "", |
| bool | sorted = false |
||
| ) |
Constructor.
Definition at line 45 of file search.hpp.
◆ ~Search()
|
virtualdefault |
Destructor.
Member Function Documentation
◆ getIndices()
|
inlinevirtual |
Get a pointer to the vector of indices used.
Definition at line 131 of file search.h.
References pcl::search::Search< PointT >::indices_.
Referenced by pcl::extractEuclideanClusters().
◆ getInputCloud()
|
inlinevirtual |
Get a pointer to the input point cloud dataset.
Definition at line 124 of file search.h.
References pcl::search::Search< PointT >::input_.
Referenced by pcl::extractEuclideanClusters(), pcl::extractEuclideanClusters(), pcl::extractLabeledEuclideanClusters(), pcl::seededHueSegmentation(), and pcl::seededHueSegmentation().
◆ getName()
|
virtual |
Returns the search method name.
Definition at line 54 of file search.hpp.
◆ getSortedResults()
|
virtual |
Gets whether the results should be sorted (ascending in the distance) or not Otherwise the results may be returned in any order.
Definition at line 68 of file search.hpp.
Referenced by pcl::extractEuclideanClusters(), pcl::extractEuclideanClusters(), pcl::extractLabeledEuclideanClusters(), pcl::seededHueSegmentation(), and pcl::seededHueSegmentation().
◆ nearestKSearch() [1/4]
|
virtual |
Search for the k-nearest neighbors for the given query point.
- Parameters
-
[in] cloud the point cloud data [in] indices a vector of point cloud indices to query for nearest neighbors [in] k the number of neighbors to search for [out] k_indices the resultant indices of the neighboring points, k_indices[i] corresponds to the neighbors of the query point i [out] k_sqr_distances the resultant squared distances to the neighboring points, k_sqr_distances[i] corresponds to the neighbors of the query point i
Reimplemented in pcl::search::FlannSearch< PointT, FlannDistance >.
Definition at line 114 of file search.hpp.
◆ nearestKSearch() [2/4]
|
virtual |
Search for k-nearest neighbors for the given query point.
- Attention
- This method does not do any bounds checking for the input index (i.e., index >= cloud.size () || index < 0), and assumes valid (i.e., finite) data.
- Parameters
-
[in] cloud the point cloud data [in] index a valid index in cloud representing a valid (i.e., finite) query point [in] k the number of neighbors to search for [out] k_indices the resultant indices of the neighboring points (must be resized to k a priori!) [out] k_sqr_distances the resultant squared distances to the neighboring points (must be resized to k a priori!)
- Returns
- number of neighbors found
- Exceptions
-
asserts in debug mode if the index is not between 0 and the maximum number of points
Definition at line 86 of file search.hpp.
◆ nearestKSearch() [3/4]
|
pure virtual |
Search for the k-nearest neighbors for the given query point.
- Parameters
-
[in] point the given query point [in] k the number of neighbors to search for [out] k_indices the resultant indices of the neighboring points (must be resized to k a priori!) [out] k_sqr_distances the resultant squared distances to the neighboring points (must be resized to k a priori!)
- Returns
- number of neighbors found
Implemented in pcl::search::KdTree< pcl::PointXYZLAB >, pcl::search::OrganizedNeighbor< PointT >, pcl::search::BruteForce< PointT >, pcl::search::FlannSearch< PointT, FlannDistance >, pcl::search::KdTree< PointT, Tree >, pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >, and pcl::search::KdTree< SceneT >.
Referenced by pcl::GeneralizedIterativeClosestPoint< PointSource, PointTarget, Scalar >::computeCovariances(), pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, pcl::Normal, float >::FPCSInitialAlignment(), pcl::StatisticalMultiscaleInterestRegionExtraction< PointT >::generateCloudGraph(), pcl::getMeanPointDensity(), pcl::getPointCloudDifference(), pcl::search::Search< PointT >::nearestKSearchT(), pcl::search::Search< PointT >::nearestKSearchT(), and pcl::ConcaveHull< PointInT >::performReconstruction().
◆ nearestKSearch() [4/4]
|
virtual |
Search for k-nearest neighbors for the given query point (zero-copy).
- Attention
- This method does not do any bounds checking for the input index (i.e., index >= cloud.size () || index < 0), and assumes valid (i.e., finite) data.
- Parameters
-
[in] index a valid index representing a valid query point in the dataset given by setInputCloud. If indices were given in setInputCloud, index will be the position in the indices vector. [in] k the number of neighbors to search for [out] k_indices the resultant indices of the neighboring points (must be resized to k a priori!) [out] k_sqr_distances the resultant squared distances to the neighboring points (must be resized to k a priori!)
- Returns
- number of neighbors found
- Exceptions
-
asserts in debug mode if the index is not between 0 and the maximum number of points
Reimplemented in pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >, and pcl::search::Octree< PointInT >.
Definition at line 96 of file search.hpp.
◆ nearestKSearchT() [1/2]
|
inline |
Search for the k-nearest neighbors for the given query point.
Use this method if the query points are of a different type than the points in the data set (e.g. PointXYZRGBA instead of PointXYZ).
- Parameters
-
[in] cloud the point cloud data [in] indices a vector of point cloud indices to query for nearest neighbors [in] k the number of neighbors to search for [out] k_indices the resultant indices of the neighboring points, k_indices[i] corresponds to the neighbors of the query point i [out] k_sqr_distances the resultant squared distances to the neighboring points, k_sqr_distances[i] corresponds to the neighbors of the query point i
- Note
- This method copies the input point cloud of type PointTDiff to a temporary cloud of type PointT and performs the batch search on the new cloud. You should prefer the single-point search if you don't use a search algorithm that accelerates batch NN search.
Definition at line 230 of file search.h.
References pcl::search::Search< PointT >::nearestKSearch(), pcl::PointCloud< PointT >::resize(), and pcl::PointCloud< PointT >::size().
◆ nearestKSearchT() [2/2]
|
inline |
Search for k-nearest neighbors for the given query point.
This method accepts a different template parameter for the point type.
- Parameters
-
[in] point the given query point [in] k the number of neighbors to search for [out] k_indices the resultant indices of the neighboring points (must be resized to k a priori!) [out] k_sqr_distances the resultant squared distances to the neighboring points (must be resized to k a priori!)
- Returns
- number of neighbors found
Definition at line 158 of file search.h.
References pcl::copyPoint(), and pcl::search::Search< PointT >::nearestKSearch().
◆ radiusSearch() [1/4]
|
virtual |
Search for all the nearest neighbors of the query point in a given radius.
- Parameters
-
[in] cloud the point cloud data [in] indices the indices in cloud. If indices is empty, neighbors will be searched for all points. [in] radius the radius of the sphere bounding all of p_q's neighbors [out] k_indices the resultant indices of the neighboring points, k_indices[i] corresponds to the neighbors of the query point i [out] k_sqr_distances the resultant squared distances to the neighboring points, k_sqr_distances[i] corresponds to the neighbors of the query point i [in] max_nn if given, bounds the maximum returned neighbors to this value. If max_nn is set to 0 or to a number higher than the number of points in the input cloud, all neighbors in radius will be returned.
Reimplemented in pcl::search::FlannSearch< PointT, FlannDistance >.
Definition at line 165 of file search.hpp.
References pcl::PointCloud< PointT >::size().
◆ radiusSearch() [2/4]
|
virtual |
Search for all the nearest neighbors of the query point in a given radius.
- Attention
- This method does not do any bounds checking for the input index (i.e., index >= cloud.size () || index < 0), and assumes valid (i.e., finite) data.
- Parameters
-
[in] cloud the point cloud data [in] index a valid index in cloud representing a valid (i.e., finite) query point [in] radius the radius of the sphere bounding all of p_q's neighbors [out] k_indices the resultant indices of the neighboring points [out] k_sqr_distances the resultant squared distances to the neighboring points [in] max_nn if given, bounds the maximum returned neighbors to this value. If max_nn is set to 0 or to a number higher than the number of points in the input cloud, all neighbors in radius will be returned.
- Returns
- number of neighbors found in radius
- Exceptions
-
asserts in debug mode if the index is not between 0 and the maximum number of points
Definition at line 139 of file search.hpp.
References pcl::PointCloud< PointT >::size().
◆ radiusSearch() [3/4]
|
pure virtual |
Search for all the nearest neighbors of the query point in a given radius.
- Parameters
-
[in] point the given query point [in] radius the radius of the sphere bounding all of p_q's neighbors [out] k_indices the resultant indices of the neighboring points [out] k_sqr_distances the resultant squared distances to the neighboring points [in] max_nn if given, bounds the maximum returned neighbors to this value. If max_nn is set to 0 or to a number higher than the number of points in the input cloud, all neighbors in radius will be returned.
- Returns
- number of neighbors found in radius
Implemented in pcl::search::KdTree< pcl::PointXYZLAB >, pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >, pcl::search::OrganizedNeighbor< PointT >, pcl::search::BruteForce< PointT >, pcl::search::FlannSearch< PointT, FlannDistance >, pcl::search::KdTree< PointT, Tree >, and pcl::search::KdTree< SceneT >.
Referenced by pcl::SmoothedSurfacesKeypoint< PointT, PointNT >::detectKeypoints(), pcl::extractEuclideanClusters(), pcl::extractEuclideanClusters(), pcl::extractLabeledEuclideanClusters(), pcl::search::Search< PointT >::radiusSearchT(), pcl::search::Search< PointT >::radiusSearchT(), pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::refineCorners(), pcl::seededHueSegmentation(), pcl::seededHueSegmentation(), and pcl::TextureMapping< PointInT >::textureMeshwithMultipleCameras().
◆ radiusSearch() [4/4]
|
virtual |
Search for all the nearest neighbors of the query point in a given radius (zero-copy).
- Attention
- This method does not do any bounds checking for the input index (i.e., index >= cloud.size () || index < 0), and assumes valid (i.e., finite) data.
- Parameters
-
[in] index a valid index representing a valid query point in the dataset given by setInputCloud. If indices were given in setInputCloud, index will be the position in the indices vector. [in] radius the radius of the sphere bounding all of p_q's neighbors [out] k_indices the resultant indices of the neighboring points [out] k_sqr_distances the resultant squared distances to the neighboring points [in] max_nn if given, bounds the maximum returned neighbors to this value. If max_nn is set to 0 or to a number higher than the number of points in the input cloud, all neighbors in radius will be returned.
- Returns
- number of neighbors found in radius
- Exceptions
-
asserts in debug mode if the index is not between 0 and the maximum number of points
Reimplemented in pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >, and pcl::search::Octree< PointInT >.
Definition at line 150 of file search.hpp.
◆ radiusSearchT() [1/2]
|
inline |
Search for all the nearest neighbors of the query points in a given radius.
- Parameters
-
[in] cloud the point cloud data [in] indices a vector of point cloud indices to query for nearest neighbors [in] radius the radius of the sphere bounding all of p_q's neighbors [out] k_indices the resultant indices of the neighboring points, k_indices[i] corresponds to the neighbors of the query point i [out] k_sqr_distances the resultant squared distances to the neighboring points, k_sqr_distances[i] corresponds to the neighbors of the query point i [in] max_nn if given, bounds the maximum returned neighbors to this value. If max_nn is set to 0 or to a number higher than the number of points in the input cloud, all neighbors in radius will be returned.
- Note
- This method copies the input point cloud of type PointTDiff to a temporary cloud of type PointT and performs the batch search on the new cloud. You should prefer the single-point search if you don't use a search algorithm that accelerates batch NN search.
Definition at line 369 of file search.h.
References pcl::search::Search< PointT >::radiusSearch(), pcl::PointCloud< PointT >::resize(), and pcl::PointCloud< PointT >::size().
◆ radiusSearchT() [2/2]
|
inline |
Search for all the nearest neighbors of the query point in a given radius.
- Parameters
-
[in] point the given query point [in] radius the radius of the sphere bounding all of p_q's neighbors [out] k_indices the resultant indices of the neighboring points [out] k_sqr_distances the resultant squared distances to the neighboring points [in] max_nn if given, bounds the maximum returned neighbors to this value. If max_nn is set to 0 or to a number higher than the number of points in the input cloud, all neighbors in radius will be returned.
- Returns
- number of neighbors found in radius
Definition at line 286 of file search.h.
References pcl::copyPoint(), and pcl::search::Search< PointT >::radiusSearch().
◆ setInputCloud()
|
virtual |
Pass the input dataset that the search will be performed on.
- Parameters
-
[in] cloud a const pointer to the PointCloud data [in] indices the point indices subset that is to be used from the cloud
- Returns
- True if successful, false if an error occurred, for example because the point cloud is unsuited for the search method.
Reimplemented in pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >, pcl::search::FlannSearch< PointT, FlannDistance >, pcl::search::KdTree< PointT, Tree >, pcl::search::KdTree< pcl::PointXYZLAB >, pcl::search::KdTree< SceneT >, and pcl::search::OrganizedNeighbor< PointT >.
Definition at line 75 of file search.hpp.
Referenced by pcl::search::autoSelectMethod().
◆ setNumberOfThreads()
|
inline |
Set the number of threads to use for searching over multiple points or indices.
- Parameters
-
[in] nr_threads the number of threads to use (0 automatically sets the threads based on the hardware)
Definition at line 401 of file search.h.
References pcl::search::Search< PointT >::num_threads_.
◆ setSortedResults()
|
virtual |
sets whether the results should be sorted (ascending in the distance) or not
- Parameters
-
[in] sorted should be true if the results should be sorted by the distance in ascending order. Otherwise the results may be returned in any order.
Reimplemented in pcl::search::KdTree< PointT, Tree >, pcl::search::KdTree< pcl::PointXYZLAB >, and pcl::search::KdTree< SceneT >.
Definition at line 61 of file search.hpp.
Referenced by pcl::search::autoSelectMethod().
◆ sortResults()
|
protected |
Definition at line 193 of file search.hpp.
Referenced by pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >::radiusSearch(), pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >::radiusSearch(), and pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >::radiusSearch().
Member Data Documentation
◆ indices_
|
protected |
Definition at line 416 of file search.h.
Referenced by pcl::search::Search< PointT >::getIndices(), pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >::setInputCloud(), pcl::search::OrganizedNeighbor< PointT >::setInputCloud(), and pcl::search::FlannSearch< PointT, FlannDistance >::setPointRepresentation().
◆ input_
|
protected |
Definition at line 415 of file search.h.
Referenced by pcl::search::Search< PointT >::getInputCloud(), pcl::search::OrganizedNeighbor< PointT >::isValid(), pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >::setInputCloud(), pcl::search::Octree< PointT, LeafTWrap, BranchTWrap, OctreeT >::setInputCloud(), pcl::search::OrganizedNeighbor< PointT >::setInputCloud(), pcl::search::FlannSearch< PointT, FlannDistance >::setPointRepresentation(), and pcl::search::OrganizedNeighbor< PointT >::testPoint().
◆ name_
|
protected |
◆ num_threads_
|
protected |
The number of threads to use when searching over multiple points or indices.
Definition at line 421 of file search.h.
Referenced by pcl::search::Search< PointT >::setNumberOfThreads().
◆ sorted_results_
|
protected |
The documentation for this class was generated from the following files:
- pcl/search/search.h
- pcl/search/impl/search.hpp