ISSKeypoint3D detects the Intrinsic Shape Signatures keypoints for a given point cloud. More...
#include <pcl/keypoints/iss_3d.h>
 Inheritance diagram for pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >:
Inheritance diagram for pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >: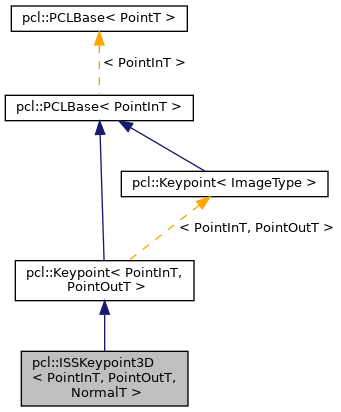 Collaboration diagram for pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >:
Collaboration diagram for pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >: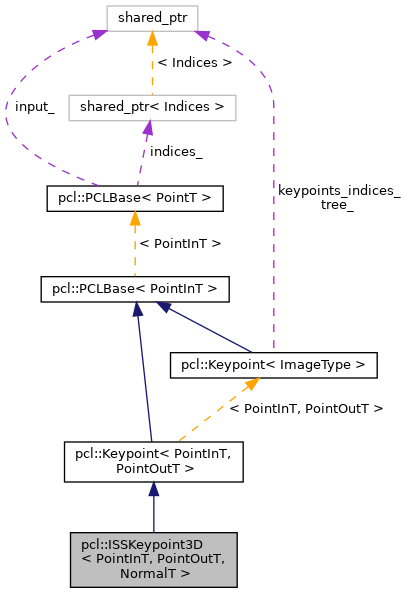
Public Types | |
| using | Ptr = shared_ptr< ISSKeypoint3D< PointInT, PointOutT, NormalT > > |
| using | ConstPtr = shared_ptr< const ISSKeypoint3D< PointInT, PointOutT, NormalT > > |
| using | PointCloudIn = typename Keypoint< PointInT, PointOutT >::PointCloudIn |
| using | PointCloudOut = typename Keypoint< PointInT, PointOutT >::PointCloudOut |
| using | PointCloudN = pcl::PointCloud< NormalT > |
| using | PointCloudNPtr = typename PointCloudN::Ptr |
| using | PointCloudNConstPtr = typename PointCloudN::ConstPtr |
| using | OctreeSearchIn = pcl::octree::OctreePointCloudSearch< PointInT > |
| using | OctreeSearchInPtr = typename OctreeSearchIn::Ptr |
| Public Types inherited from pcl::Keypoint< PointInT, PointOutT > | |
| using | Ptr = shared_ptr< Keypoint< PointInT, PointOutT > > |
| using | ConstPtr = shared_ptr< const Keypoint< PointInT, PointOutT > > |
| using | BaseClass = PCLBase< PointInT > |
| using | KdTree = pcl::search::Search< PointInT > |
| using | KdTreePtr = typename KdTree::Ptr |
| using | PointCloudIn = pcl::PointCloud< PointInT > |
| using | PointCloudInPtr = typename PointCloudIn::Ptr |
| using | PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
| using | PointCloudOut = pcl::PointCloud< PointOutT > |
| using | SearchMethod = std::function< int(pcl::index_t, double, pcl::Indices &, std::vector< float > &)> |
| using | SearchMethodSurface = std::function< int(const PointCloudIn &cloud, pcl::index_t index, double, pcl::Indices &, std::vector< float > &)> |
| Public Types inherited from pcl::PCLBase< PointInT > | |
| using | PointCloud = pcl::PointCloud< PointInT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| ISSKeypoint3D (double salient_radius=0.0001) | |
| Constructor. | |
| ~ISSKeypoint3D () override | |
| Destructor. | |
| void | setSalientRadius (double salient_radius) |
| Set the radius of the spherical neighborhood used to compute the scatter matrix. | |
| void | setNonMaxRadius (double non_max_radius) |
| Set the radius for the application of the non maxima suppression algorithm. | |
| void | setNormalRadius (double normal_radius) |
| Set the radius used for the estimation of the surface normals of the input cloud. | |
| void | setBorderRadius (double border_radius) |
| Set the radius used for the estimation of the boundary points. | |
| void | setThreshold21 (double gamma_21) |
| Set the upper bound on the ratio between the second and the first eigenvalue. | |
| void | setThreshold32 (double gamma_32) |
| Set the upper bound on the ratio between the third and the second eigenvalue. | |
| void | setMinNeighbors (int min_neighbors) |
| Set the minimum number of neighbors that has to be found while applying the non maxima suppression algorithm. | |
| void | setNormals (const PointCloudNConstPtr &normals) |
| Set the normals if pre-calculated normals are available. | |
| void | setAngleThreshold (float angle) |
| Set the decision boundary (angle threshold) that marks points as boundary or regular. | |
| void | setNumberOfThreads (unsigned int nr_threads=0) |
| Initialize the scheduler and set the number of threads to use. | |
| Public Member Functions inherited from pcl::Keypoint< PointInT, PointOutT > | |
| Keypoint ()=default | |
| Keypoint () | |
| Empty constructor. | |
| void | harrisCorner (PointInT &output, PointInT &input, const float sigma_d, const float sigma_i, const float alpha, const float thresh) |
| void | hessianBlob (PointInT &output, PointInT &input, const float sigma, bool SCALE) |
| void | hessianBlob (PointInT &output, PointInT &input, const float start_scale, const float scaling_factor, const int num_scales) |
| void | imageElementMultiply (PointInT &output, PointInT &input1, PointInT &input2) |
| ~Keypoint () override=default | |
| Empty destructor. | |
| virtual void | setSearchSurface (const PointCloudInConstPtr &cloud) |
| Provide a pointer to the input dataset that we need to estimate features at every point for. | |
| PointCloudInConstPtr | getSearchSurface () |
| Get a pointer to the surface point cloud dataset. | |
| void | setSearchMethod (const KdTreePtr &tree) |
| Provide a pointer to the search object. | |
| KdTreePtr | getSearchMethod () |
| Get a pointer to the search method used. | |
| double | getSearchParameter () |
| Get the internal search parameter. | |
| void | setKSearch (int k) |
| Set the number of k nearest neighbors to use for the feature estimation. | |
| int | getKSearch () |
| get the number of k nearest neighbors used for the feature estimation. | |
| void | setRadiusSearch (double radius) |
| Set the sphere radius that is to be used for determining the nearest neighbors used for the key point detection. | |
| double | getRadiusSearch () |
| Get the sphere radius used for determining the neighbors. | |
| pcl::PointIndicesConstPtr | getKeypointsIndices () |
| void | compute (PointCloudOut &output) |
| Base method for key point detection for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
| int | searchForNeighbors (pcl::index_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface. | |
| Public Member Functions inherited from pcl::PCLBase< PointInT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointInT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| bool * | getBoundaryPoints (PointCloudIn &input, double border_radius, float angle_threshold) |
| Compute the boundary points for the given input cloud. | |
| void | getScatterMatrix (const int ¤t_index, Eigen::Matrix3d &cov_m) |
| Compute the scatter matrix for a point index. | |
| bool | initCompute () override |
| Perform the initial checks before computing the keypoints. | |
| void | detectKeypoints (PointCloudOut &output) override |
| Detect the keypoints by performing the EVD of the scatter matrix. | |
| Protected Member Functions inherited from pcl::Keypoint< PointInT, PointOutT > | |
| const std::string & | getClassName () const |
| Get a string representation of the name of this class. | |
| virtual void | detectKeypoints (PointCloudOut &output)=0 |
| Abstract key point detection method. | |
| Protected Member Functions inherited from pcl::PCLBase< PointInT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Protected Attributes | |
| double | salient_radius_ |
| The radius of the spherical neighborhood used to compute the scatter matrix. | |
| double | non_max_radius_ {0.0} |
| The non maxima suppression radius. | |
| double | normal_radius_ {0.0} |
| The radius used to compute the normals of the input cloud. | |
| double | border_radius_ {0.0} |
| The radius used to compute the boundary points of the input cloud. | |
| double | gamma_21_ {0.975} |
| The upper bound on the ratio between the second and the first eigenvalue returned by the EVD. | |
| double | gamma_32_ {0.975} |
| The upper bound on the ratio between the third and the second eigenvalue returned by the EVD. | |
| double * | third_eigen_value_ {nullptr} |
| Store the third eigen value associated to each point in the input cloud. | |
| bool * | edge_points_ {nullptr} |
| Store the information about the boundary points of the input cloud. | |
| int | min_neighbors_ {5} |
| Minimum number of neighbors that has to be found while applying the non maxima suppression algorithm. | |
| PointCloudNConstPtr | normals_ |
| The cloud of normals related to the input surface. | |
| float | angle_threshold_ |
| The decision boundary (angle threshold) that marks points as boundary or regular. | |
| unsigned int | threads_ {0} |
| The number of threads that has to be used by the scheduler. | |
| Protected Attributes inherited from pcl::Keypoint< PointInT, PointOutT > | |
| std::string | name_ |
| The key point detection method's name. | |
| SearchMethod | search_method_ |
| The search method template for indices. | |
| SearchMethodSurface | search_method_surface_ |
| The search method template for points. | |
| PointCloudInConstPtr | surface_ |
| An input point cloud describing the surface that is to be used for nearest neighbors estimation. | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
| double | search_parameter_ |
| The actual search parameter (casted from either search_radius_ or k_). | |
| double | search_radius_ |
| The nearest neighbors search radius for each point. | |
| int | k_ |
| The number of K nearest neighbors to use for each point. | |
| pcl::PointIndicesPtr | keypoints_indices_ |
| Indices of the keypoints in the input cloud. | |
| Protected Attributes inherited from pcl::PCLBase< PointInT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >
ISSKeypoint3D detects the Intrinsic Shape Signatures keypoints for a given point cloud.
This class is based on a particular implementation made by Federico Tombari and Samuele Salti and it has been explicitly adapted to PCL.
For more information about the original ISS detector, see:
- Yu Zhong, “Intrinsic shape signatures: A shape descriptor for 3D object recognition,” Computer Vision Workshops (ICCV Workshops), 2009 IEEE 12th International Conference on , vol., no., pp.689-696, Sept. 27 2009-Oct. 4 2009
Code example:
Member Typedef Documentation
◆ ConstPtr
| using pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::ConstPtr = shared_ptr<const ISSKeypoint3D<PointInT, PointOutT, NormalT> > |
◆ OctreeSearchIn
| using pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::OctreeSearchIn = pcl::octree::OctreePointCloudSearch<PointInT> |
◆ OctreeSearchInPtr
| using pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::OctreeSearchInPtr = typename OctreeSearchIn::Ptr |
◆ PointCloudIn
| using pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::PointCloudIn = typename Keypoint<PointInT, PointOutT>::PointCloudIn |
◆ PointCloudN
| using pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::PointCloudN = pcl::PointCloud<NormalT> |
◆ PointCloudNConstPtr
| using pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::PointCloudNConstPtr = typename PointCloudN::ConstPtr |
◆ PointCloudNPtr
| using pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::PointCloudNPtr = typename PointCloudN::Ptr |
◆ PointCloudOut
| using pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::PointCloudOut = typename Keypoint<PointInT, PointOutT>::PointCloudOut |
◆ Ptr
| using pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::Ptr = shared_ptr<ISSKeypoint3D<PointInT, PointOutT, NormalT> > |
Constructor & Destructor Documentation
◆ ISSKeypoint3D()
|
inline |
Constructor.
- Parameters
-
[in] salient_radius the radius of the spherical neighborhood used to compute the scatter matrix.
Definition at line 112 of file iss_3d.h.
References pcl::Keypoint< PointInT, PointOutT >::name_, pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::salient_radius_, pcl::Keypoint< PointInT, PointOutT >::search_radius_, pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setNumberOfThreads(), and pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::threads_.
◆ ~ISSKeypoint3D()
|
inlineoverride |
Destructor.
Definition at line 123 of file iss_3d.h.
References pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::edge_points_, and pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::third_eigen_value_.
Member Function Documentation
◆ detectKeypoints()
|
overrideprotected |
Detect the keypoints by performing the EVD of the scatter matrix.
- Parameters
-
[out] output the resultant cloud of keypoints
Definition at line 303 of file iss_3d.hpp.
References pcl::isFinite().
◆ getBoundaryPoints()
|
protected |
Compute the boundary points for the given input cloud.
- Parameters
-
[in] input the input cloud [in] border_radius the radius used to compute the boundary points [in] angle_threshold the decision boundary that marks the points as boundary
- Returns
- the vector of boolean values in which the information about the boundary points is stored
Definition at line 120 of file iss_3d.hpp.
References pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::getCoordinateSystemOnPlane(), pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::isBoundaryPoint(), pcl::isFinite(), and pcl::PCLBase< PointT >::setInputCloud().
◆ getScatterMatrix()
|
protected |
Compute the scatter matrix for a point index.
- Parameters
-
[in] current_index the index of the point [out] cov_m the point scatter matrix
Definition at line 165 of file iss_3d.hpp.
◆ initCompute()
|
overrideprotectedvirtual |
Perform the initial checks before computing the keypoints.
- Returns
- true if all the checks are passed, false otherwise
Reimplemented from pcl::Keypoint< PointInT, PointOutT >.
Definition at line 212 of file iss_3d.hpp.
References pcl::Feature< PointInT, PointOutT >::compute(), pcl::NormalEstimation< PointInT, PointOutT >::setInputCloud(), pcl::IntegralImageNormalEstimation< PointInT, PointOutT >::setInputCloud(), pcl::IntegralImageNormalEstimation< PointInT, PointOutT >::setNormalEstimationMethod(), pcl::IntegralImageNormalEstimation< PointInT, PointOutT >::setNormalSmoothingSize(), and pcl::Feature< PointInT, PointOutT >::setRadiusSearch().
◆ setAngleThreshold()
|
inline |
Set the decision boundary (angle threshold) that marks points as boundary or regular.
(default 
- Parameters
-
[in] angle the angle threshold
Definition at line 184 of file iss_3d.h.
References pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::angle_threshold_.
◆ setBorderRadius()
| void pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setBorderRadius | ( | double | border_radius | ) |
Set the radius used for the estimation of the boundary points.
If the radius is too large, the temporal performances of the detector may degrade significantly.
- Parameters
-
[in] border_radius the radius used to compute the boundary points
Definition at line 71 of file iss_3d.hpp.
◆ setMinNeighbors()
| void pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setMinNeighbors | ( | int | min_neighbors | ) |
Set the minimum number of neighbors that has to be found while applying the non maxima suppression algorithm.
- Parameters
-
[in] min_neighbors the minimum number of neighbors required
Definition at line 92 of file iss_3d.hpp.
◆ setNonMaxRadius()
| void pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setNonMaxRadius | ( | double | non_max_radius | ) |
Set the radius for the application of the non maxima suppression algorithm.
- Parameters
-
[in] non_max_radius the non maxima suppression radius
Definition at line 57 of file iss_3d.hpp.
◆ setNormalRadius()
| void pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setNormalRadius | ( | double | normal_radius | ) |
Set the radius used for the estimation of the surface normals of the input cloud.
If the radius is too large, the temporal performances of the detector may degrade significantly.
- Parameters
-
[in] normal_radius the radius used to estimate surface normals
Definition at line 64 of file iss_3d.hpp.
◆ setNormals()
| void pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setNormals | ( | const PointCloudNConstPtr & | normals | ) |
Set the normals if pre-calculated normals are available.
- Parameters
-
[in] normals the given cloud of normals
Definition at line 99 of file iss_3d.hpp.
◆ setNumberOfThreads()
| void pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setNumberOfThreads | ( | unsigned int | nr_threads = 0 | ) |
Initialize the scheduler and set the number of threads to use.
- Parameters
-
[in] nr_threads the number of hardware threads to use (0 sets the value back to automatic)
Definition at line 106 of file iss_3d.hpp.
Referenced by pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::ISSKeypoint3D().
◆ setSalientRadius()
| void pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setSalientRadius | ( | double | salient_radius | ) |
Set the radius of the spherical neighborhood used to compute the scatter matrix.
- Parameters
-
[in] salient_radius the radius of the spherical neighborhood
Definition at line 50 of file iss_3d.hpp.
◆ setThreshold21()
| void pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setThreshold21 | ( | double | gamma_21 | ) |
Set the upper bound on the ratio between the second and the first eigenvalue.
- Parameters
-
[in] gamma_21 the upper bound on the ratio between the second and the first eigenvalue
Definition at line 78 of file iss_3d.hpp.
◆ setThreshold32()
| void pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setThreshold32 | ( | double | gamma_32 | ) |
Set the upper bound on the ratio between the third and the second eigenvalue.
- Parameters
-
[in] gamma_32 the upper bound on the ratio between the third and the second eigenvalue
Definition at line 85 of file iss_3d.hpp.
Member Data Documentation
◆ angle_threshold_
|
protected |
The decision boundary (angle threshold) that marks points as boundary or regular.
(default
Definition at line 257 of file iss_3d.h.
Referenced by pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::setAngleThreshold().
◆ border_radius_
|
protected |
◆ edge_points_
|
protected |
Store the information about the boundary points of the input cloud.
Definition at line 248 of file iss_3d.h.
Referenced by pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::~ISSKeypoint3D().
◆ gamma_21_
|
protected |
◆ gamma_32_
|
protected |
◆ min_neighbors_
|
protected |
◆ non_max_radius_
|
protected |
◆ normal_radius_
|
protected |
◆ normals_
|
protected |
◆ salient_radius_
|
protected |
The radius of the spherical neighborhood used to compute the scatter matrix.
Definition at line 227 of file iss_3d.h.
Referenced by pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::ISSKeypoint3D().
◆ third_eigen_value_
|
protected |
Store the third eigen value associated to each point in the input cloud.
Definition at line 245 of file iss_3d.h.
Referenced by pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::~ISSKeypoint3D().
◆ threads_
|
protected |
The number of threads that has to be used by the scheduler.
Definition at line 260 of file iss_3d.h.
Referenced by pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::ISSKeypoint3D().
The documentation for this class was generated from the following files:
- pcl/keypoints/iss_3d.h
- pcl/keypoints/impl/iss_3d.hpp