FPCSInitialAlignment computes corresponding four point congruent sets as described in: "4-points congruent sets for robust pairwise surface registration", Dror Aiger, Niloy Mitra, Daniel Cohen-Or. More...
#include <pcl/registration/ia_fpcs.h>
 Inheritance diagram for pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >:
Inheritance diagram for pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >: Collaboration diagram for pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >:
Collaboration diagram for pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >: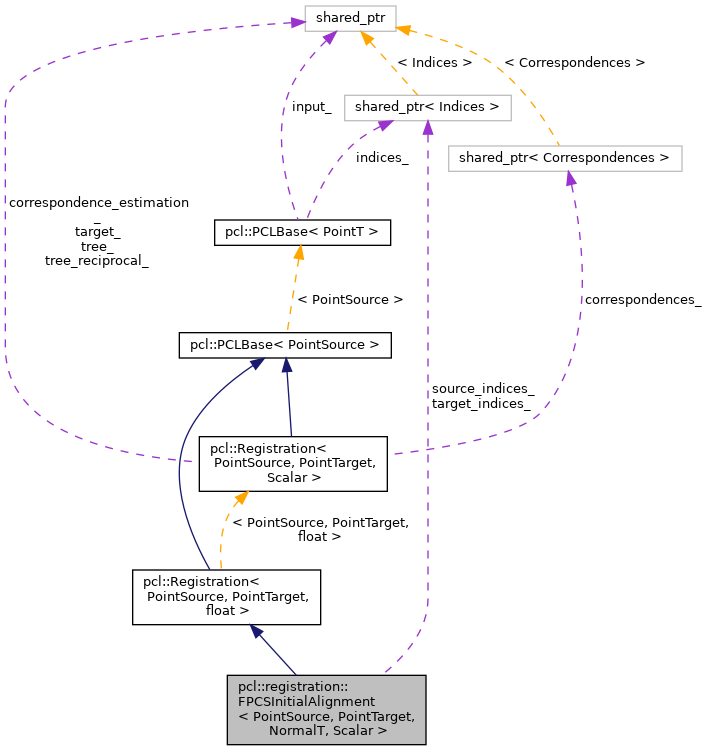
Public Member Functions | |
| FPCSInitialAlignment () | |
| Constructor. | |
| ~FPCSInitialAlignment () override=default | |
| Destructor. | |
| void | setTargetIndices (const IndicesPtr &target_indices) |
| Provide a pointer to the vector of target indices. | |
| IndicesPtr | getTargetIndices () const |
| void | setSourceNormals (const NormalsConstPtr &source_normals) |
| Provide a pointer to the normals of the source point cloud. | |
| NormalsConstPtr | getSourceNormals () const |
| void | setTargetNormals (const NormalsConstPtr &target_normals) |
| Provide a pointer to the normals of the target point cloud. | |
| NormalsConstPtr | getTargetNormals () const |
| void | setNumberOfThreads (int nr_threads) |
| Set the number of used threads if OpenMP is activated. | |
| int | getNumberOfThreads () const |
| void | setDelta (float delta, bool normalize=false) |
| Set the constant factor delta which weights the internally calculated parameters. | |
| float | getDelta () const |
| void | setApproxOverlap (float approx_overlap) |
| Set the approximate overlap between source and target. | |
| float | getApproxOverlap () const |
| void | setScoreThreshold (float score_threshold) |
| Set the scoring threshold used for early finishing the method. | |
| float | getScoreThreshold () const |
| void | setNumberOfSamples (int nr_samples) |
| Set the number of source samples to use during alignment. | |
| int | getNumberOfSamples () const |
| void | setMaxNormalDifference (float max_norm_diff) |
| Set the maximum normal difference between valid point correspondences in degree. | |
| float | getMaxNormalDifference () const |
| void | setMaxComputationTime (int max_runtime) |
| Set the maximum computation time in seconds. | |
| int | getMaxComputationTime () const |
| float | getFitnessScore () const |
| Public Member Functions inherited from pcl::Registration< PointSource, PointTarget, Scalar > | |
| Registration () | |
| Empty constructor. | |
| ~Registration () override=default | |
| destructor. | |
| void | setTransformationEstimation (const TransformationEstimationPtr &te) |
| Provide a pointer to the transformation estimation object. | |
| void | setCorrespondenceEstimation (const CorrespondenceEstimationPtr &ce) |
| Provide a pointer to the correspondence estimation object. | |
| virtual void | setInputSource (const PointCloudSourceConstPtr &cloud) |
| Provide a pointer to the input source (e.g., the point cloud that we want to align to the target) | |
| PointCloudSourceConstPtr const | getInputSource () |
| Get a pointer to the input point cloud dataset target. | |
| virtual void | setInputTarget (const PointCloudTargetConstPtr &cloud) |
| Provide a pointer to the input target (e.g., the point cloud that we want to align the input source to) | |
| PointCloudTargetConstPtr const | getInputTarget () |
| Get a pointer to the input point cloud dataset target. | |
| void | setSearchMethodTarget (const KdTreePtr &tree, bool force_no_recompute=false) |
| Provide a pointer to the search object used to find correspondences in the target cloud. | |
| KdTreePtr | getSearchMethodTarget () const |
| Get a pointer to the search method used to find correspondences in the target cloud. | |
| void | setSearchMethodSource (const KdTreeReciprocalPtr &tree, bool force_no_recompute=false) |
| Provide a pointer to the search object used to find correspondences in the source cloud (usually used by reciprocal correspondence finding). | |
| KdTreeReciprocalPtr | getSearchMethodSource () const |
| Get a pointer to the search method used to find correspondences in the source cloud. | |
| Matrix4 | getFinalTransformation () |
| Get the final transformation matrix estimated by the registration method. | |
| Matrix4 | getLastIncrementalTransformation () |
| Get the last incremental transformation matrix estimated by the registration method. | |
| void | setMaximumIterations (int nr_iterations) |
| Set the maximum number of iterations the internal optimization should run for. | |
| int | getMaximumIterations () |
| Get the maximum number of iterations the internal optimization should run for, as set by the user. | |
| void | setRANSACIterations (int ransac_iterations) |
| Set the number of iterations RANSAC should run for. | |
| double | getRANSACIterations () |
| Get the number of iterations RANSAC should run for, as set by the user. | |
| void | setRANSACOutlierRejectionThreshold (double inlier_threshold) |
| Set the inlier distance threshold for the internal RANSAC outlier rejection loop. | |
| double | getRANSACOutlierRejectionThreshold () |
| Get the inlier distance threshold for the internal outlier rejection loop as set by the user. | |
| void | setMaxCorrespondenceDistance (double distance_threshold) |
| Set the maximum distance threshold between two correspondent points in source <-> target. | |
| double | getMaxCorrespondenceDistance () |
| Get the maximum distance threshold between two correspondent points in source <-> target. | |
| void | setTransformationEpsilon (double epsilon) |
| Set the transformation epsilon (maximum allowable translation squared difference between two consecutive transformations) in order for an optimization to be considered as having converged to the final solution. | |
| double | getTransformationEpsilon () |
| Get the transformation epsilon (maximum allowable translation squared difference between two consecutive transformations) as set by the user. | |
| void | setTransformationRotationEpsilon (double epsilon) |
| Set the transformation rotation epsilon (maximum allowable rotation difference between two consecutive transformations) in order for an optimization to be considered as having converged to the final solution. | |
| double | getTransformationRotationEpsilon () |
| Get the transformation rotation epsilon (maximum allowable difference between two consecutive transformations) as set by the user (epsilon is the cos(angle) in a axis-angle representation). | |
| void | setEuclideanFitnessEpsilon (double epsilon) |
| Set the maximum allowed Euclidean error between two consecutive steps in the ICP loop, before the algorithm is considered to have converged. | |
| double | getEuclideanFitnessEpsilon () |
| Get the maximum allowed distance error before the algorithm will be considered to have converged, as set by the user. | |
| void | setPointRepresentation (const PointRepresentationConstPtr &point_representation) |
| Provide a boost shared pointer to the PointRepresentation to be used when comparing points. | |
| bool | registerVisualizationCallback (std::function< UpdateVisualizerCallbackSignature > &visualizerCallback) |
| Register the user callback function which will be called from registration thread in order to update point cloud obtained after each iteration. | |
| double | getFitnessScore (double max_range=std::numeric_limits< double >::max(), bool use_indices=false) |
| Obtain the Euclidean fitness score (e.g., mean of squared distances from the source to the target) | |
| double | getFitnessScore (const std::vector< float > &distances_a, const std::vector< float > &distances_b) |
| Obtain the Euclidean fitness score (e.g., mean of squared distances from the source to the target) from two sets of correspondence distances (distances between source and target points) | |
| bool | hasConverged () const |
| Return the state of convergence after the last align run. | |
| void | align (PointCloudSource &output) |
| Call the registration algorithm which estimates the transformation and returns the transformed source (input) as output. | |
| void | align (PointCloudSource &output, const Matrix4 &guess) |
| Call the registration algorithm which estimates the transformation and returns the transformed source (input) as output. | |
| const std::string & | getClassName () const |
| Abstract class get name method. | |
| bool | initCompute () |
| Internal computation initialization. | |
| bool | initComputeReciprocal () |
| Internal computation when reciprocal lookup is needed. | |
| void | addCorrespondenceRejector (const CorrespondenceRejectorPtr &rejector) |
| Add a new correspondence rejector to the list. | |
| std::vector< CorrespondenceRejectorPtr > | getCorrespondenceRejectors () |
| Get the list of correspondence rejectors. | |
| bool | removeCorrespondenceRejector (unsigned int i) |
| Remove the i-th correspondence rejector in the list. | |
| void | clearCorrespondenceRejectors () |
| Clear the list of correspondence rejectors. | |
| Public Member Functions inherited from pcl::PCLBase< PointSource > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointSource & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| void | computeTransformation (PointCloudSource &output, const Eigen::Matrix4f &guess) override |
| Rigid transformation computation method. | |
| virtual bool | initCompute () |
| Internal computation initialization. | |
| int | selectBase (pcl::Indices &base_indices, float(&ratio)[2]) |
| Select an approximately coplanar set of four points from the source cloud. | |
| int | selectBaseTriangle (pcl::Indices &base_indices) |
| Select randomly a triplet of points with large point-to-point distances. | |
| void | setupBase (pcl::Indices &base_indices, float(&ratio)[2]) |
| Setup the base (four coplanar points) by ordering the points and computing intersection ratios and segment to segment distances of base diagonal. | |
| float | segmentToSegmentDist (const pcl::Indices &base_indices, float(&ratio)[2]) |
| Calculate intersection ratios and segment to segment distances of base diagonals. | |
| virtual int | bruteForceCorrespondences (int idx1, int idx2, pcl::Correspondences &pairs) |
| Search for corresponding point pairs given the distance between two base points. | |
| virtual int | determineBaseMatches (const pcl::Indices &base_indices, std::vector< pcl::Indices > &matches, const pcl::Correspondences &pairs_a, const pcl::Correspondences &pairs_b, const float(&ratio)[2]) |
| Determine base matches by combining the point pair candidate and search for coinciding intersection points using the diagonal segment ratios of base B. | |
| int | checkBaseMatch (const pcl::Indices &match_indices, const float(&ds)[4]) |
| Check if outer rectangle distance of matched points fit with the base rectangle. | |
| virtual void | handleMatches (const pcl::Indices &base_indices, std::vector< pcl::Indices > &matches, MatchingCandidates &candidates) |
| Method to handle current candidate matches. | |
| virtual void | linkMatchWithBase (const pcl::Indices &base_indices, pcl::Indices &match_indices, pcl::Correspondences &correspondences) |
| Sets the correspondences between the base B and the match M by using the distance of each point to the centroid of the rectangle. | |
| virtual int | validateMatch (const pcl::Indices &base_indices, const pcl::Indices &match_indices, const pcl::Correspondences &correspondences, Eigen::Matrix4f &transformation) |
| Validate the matching by computing the transformation between the source and target based on the four matched points and by comparing the mean square error (MSE) to a threshold. | |
| virtual int | validateTransformation (Eigen::Matrix4f &transformation, float &fitness_score) |
| Validate the transformation by calculating the number of inliers after transforming the source cloud. | |
| virtual void | finalCompute (const std::vector< MatchingCandidates > &candidates) |
| Final computation of best match out of vector of best matches. | |
| Protected Member Functions inherited from pcl::Registration< PointSource, PointTarget, Scalar > | |
| bool | searchForNeighbors (const PointCloudSource &cloud, int index, pcl::Indices &indices, std::vector< float > &distances) |
| Search for the closest nearest neighbor of a given point. | |
| virtual void | computeTransformation (PointCloudSource &output, const Matrix4 &guess)=0 |
| Abstract transformation computation method with initial guess. | |
| Protected Member Functions inherited from pcl::PCLBase< PointSource > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Protected Attributes | |
| NormalsConstPtr | source_normals_ |
| Normals of source point cloud. | |
| NormalsConstPtr | target_normals_ |
| Normals of target point cloud. | |
| int | nr_threads_ {1} |
| Number of threads for parallelization (standard = 1). | |
| float | approx_overlap_ {0.5f} |
| Estimated overlap between source and target (standard = 0.5). | |
| float | delta_ {1.f} |
| Delta value of 4pcs algorithm (standard = 1.0). | |
| float | score_threshold_ |
| Score threshold to stop calculation with success. | |
| int | nr_samples_ {0} |
| The number of points to uniformly sample the source point cloud. | |
| float | max_norm_diff_ {90.f} |
| Maximum normal difference of corresponding point pairs in degrees (standard = 90). | |
| int | max_runtime_ {0} |
| Maximum allowed computation time in seconds (standard = 0 => ~unlimited). | |
| float | fitness_score_ |
| Resulting fitness score of the best match. | |
| float | diameter_ {0.0f} |
| Estimated diameter of the target point cloud. | |
| float | max_base_diameter_sqr_ {0.0f} |
| Estimated squared metric overlap between source and target. | |
| bool | use_normals_ {false} |
| Use normals flag. | |
| bool | normalize_delta_ {true} |
| Normalize delta flag. | |
| pcl::IndicesPtr | source_indices_ |
| A pointer to the vector of source point indices to use after sampling. | |
| pcl::IndicesPtr | target_indices_ |
| A pointer to the vector of target point indices to use after sampling. | |
| float | max_pair_diff_ {0.0f} |
| Maximal difference between corresponding point pairs in source and target. | |
| float | max_edge_diff_ {0.0f} |
| Maximal difference between the length of the base edges and valid match edges. | |
| float | coincidation_limit_ {0.0f} |
| Maximal distance between coinciding intersection points to find valid matches. | |
| float | max_mse_ {0.0f} |
| Maximal mean squared errors of a transformation calculated from a candidate match. | |
| float | max_inlier_dist_sqr_ {0.0f} |
| Maximal squared point distance between source and target points to count as inlier. | |
| const float | small_error_ {0.00001f} |
| Definition of a small error. | |
| Protected Attributes inherited from pcl::Registration< PointSource, PointTarget, Scalar > | |
| std::string | reg_name_ |
| The registration method name. | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
| KdTreeReciprocalPtr | tree_reciprocal_ |
| A pointer to the spatial search object of the source. | |
| int | nr_iterations_ {0} |
| The number of iterations the internal optimization ran for (used internally). | |
| int | max_iterations_ {10} |
| The maximum number of iterations the internal optimization should run for. | |
| int | ransac_iterations_ {0} |
| The number of iterations RANSAC should run for. | |
| PointCloudTargetConstPtr | target_ |
| The input point cloud dataset target. | |
| Matrix4 | final_transformation_ |
| The final transformation matrix estimated by the registration method after N iterations. | |
| Matrix4 | transformation_ |
| The transformation matrix estimated by the registration method. | |
| Matrix4 | previous_transformation_ |
| The previous transformation matrix estimated by the registration method (used internally). | |
| double | transformation_epsilon_ {0.0} |
| The maximum difference between two consecutive transformations in order to consider convergence (user defined). | |
| double | transformation_rotation_epsilon_ {0.0} |
| The maximum rotation difference between two consecutive transformations in order to consider convergence (user defined). | |
| double | euclidean_fitness_epsilon_ |
| The maximum allowed Euclidean error between two consecutive steps in the ICP loop, before the algorithm is considered to have converged. | |
| double | corr_dist_threshold_ |
| The maximum distance threshold between two correspondent points in source <-> target. | |
| double | inlier_threshold_ {0.05} |
| The inlier distance threshold for the internal RANSAC outlier rejection loop. | |
| bool | converged_ {false} |
| Holds internal convergence state, given user parameters. | |
| unsigned int | min_number_correspondences_ {3} |
| The minimum number of correspondences that the algorithm needs before attempting to estimate the transformation. | |
| CorrespondencesPtr | correspondences_ |
| The set of correspondences determined at this ICP step. | |
| TransformationEstimationPtr | transformation_estimation_ |
| A TransformationEstimation object, used to calculate the 4x4 rigid transformation. | |
| CorrespondenceEstimationPtr | correspondence_estimation_ |
| A CorrespondenceEstimation object, used to estimate correspondences between the source and the target cloud. | |
| std::vector< CorrespondenceRejectorPtr > | correspondence_rejectors_ |
| The list of correspondence rejectors to use. | |
| bool | target_cloud_updated_ {true} |
| Variable that stores whether we have a new target cloud, meaning we need to pre-process it again. | |
| bool | source_cloud_updated_ {true} |
| Variable that stores whether we have a new source cloud, meaning we need to pre-process it again. | |
| bool | force_no_recompute_ {false} |
| A flag which, if set, means the tree operating on the target cloud will never be recomputed. | |
| bool | force_no_recompute_reciprocal_ {false} |
| A flag which, if set, means the tree operating on the source cloud will never be recomputed. | |
| std::function< UpdateVisualizerCallbackSignature > | update_visualizer_ |
| Callback function to update intermediate source point cloud position during it's registration to the target point cloud. | |
| Protected Attributes inherited from pcl::PCLBase< PointSource > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >
FPCSInitialAlignment computes corresponding four point congruent sets as described in: "4-points congruent sets for robust pairwise surface registration", Dror Aiger, Niloy Mitra, Daniel Cohen-Or.
ACM Transactions on Graphics, vol. 27(3), 2008
Constructor & Destructor Documentation
◆ FPCSInitialAlignment()
| pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::FPCSInitialAlignment | ( | ) |
Constructor.
Resets the maximum number of iterations to 0 thus forcing an internal computation if not set by the user. Sets the number of RANSAC iterations to 1000 and the standard transformation estimation to TransformationEstimation3Point.
Definition at line 125 of file ia_fpcs.hpp.
References pcl::Registration< PointSource, PointTarget, Scalar >::max_iterations_, pcl::Registration< PointSource, PointTarget, Scalar >::ransac_iterations_, pcl::Registration< PointSource, PointTarget, Scalar >::reg_name_, and pcl::Registration< PointSource, PointTarget, Scalar >::transformation_estimation_.
◆ ~FPCSInitialAlignment()
|
overridedefault |
Destructor.
Member Function Documentation
◆ bruteForceCorrespondences()
|
protectedvirtual |
Search for corresponding point pairs given the distance between two base points.
- Parameters
-
[in] idx1 first index of current base segment (in source cloud) [in] idx2 second index of current base segment (in source cloud) [out] pairs resulting point pairs with point-to-point distance close to ref_dist
- Returns
- < 0 no corresponding point pair was found
- = 0 at least one point pair candidate was found
Definition at line 584 of file ia_fpcs.hpp.
References pcl::euclideanDistance(), and M_PI.
◆ checkBaseMatch()
|
protected |
Check if outer rectangle distance of matched points fit with the base rectangle.
- Parameters
-
[in] match_indices indices of match M [in] ds edge lengths of base B
- Returns
- < 0 at least one edge of the match M has no corresponding one in the base B
- = 0 edges of match M fits to the ones of base B
Definition at line 737 of file ia_fpcs.hpp.
References pcl::euclideanDistance().
◆ computeTransformation()
|
overrideprotected |
Rigid transformation computation method.
- Parameters
-
output the transformed input point cloud dataset using the rigid transformation found guess The computed transforamtion
Definition at line 142 of file ia_fpcs.hpp.
References pcl::StopWatch::getTimeSeconds(), and pcl::transformPointCloud().
◆ determineBaseMatches()
|
protectedvirtual |
Determine base matches by combining the point pair candidate and search for coinciding intersection points using the diagonal segment ratios of base B.
The coincidation threshold is calculated during initialization (coincidation_limit_).
- Parameters
-
[in] base_indices indices of base B [out] matches vector of candidate matches w.r.t the base B [in] pairs_a point pairs corresponding to points of 1st diagonal of base B [in] pairs_b point pairs corresponding to points of 2nd diagonal of base B [in] ratio diagonal intersection ratios of base points
- Returns
- < 0 no base match could be found
- = 0 at least one base match was found
Definition at line 638 of file ia_fpcs.hpp.
References pcl::euclideanDistance(), and pcl::search::radius_search.
◆ finalCompute()
|
protectedvirtual |
Final computation of best match out of vector of best matches.
To avoid cross thread dependencies during parallel running, a best match for each try was calculated.
- Note
- For forwards compatibility the candidates are stored in vectors of 'vectors of size 1'.
- Parameters
-
[in] candidates vector of candidate matches
Reimplemented in pcl::registration::KFPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >.
Definition at line 926 of file ia_fpcs.hpp.
◆ getApproxOverlap()
|
inline |
- Returns
- the approximated overlap between source and target.
Definition at line 208 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::approx_overlap_.
◆ getDelta()
|
inline |
- Returns
- the constant factor delta which weights the internally calculated parameters.
Definition at line 192 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::delta_.
◆ getFitnessScore()
|
inline |
- Returns
- the fitness score of the best scored four-point match.
Definition at line 280 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::fitness_score_.
◆ getMaxComputationTime()
|
inline |
- Returns
- the maximum computation time in seconds.
Definition at line 273 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::max_runtime_.
◆ getMaxNormalDifference()
|
inline |
- Returns
- the maximum normal difference between valid point correspondences in degree.
Definition at line 257 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::max_norm_diff_.
◆ getNumberOfSamples()
|
inline |
- Returns
- the number of source samples to use during alignment.
Definition at line 240 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::nr_samples_.
◆ getNumberOfThreads()
|
inline |
- Returns
- the number of threads used if OpenMP is activated.
Definition at line 173 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::nr_threads_.
◆ getScoreThreshold()
|
inline |
- Returns
- the scoring threshold used for early finishing the method.
Definition at line 224 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::score_threshold_.
◆ getSourceNormals()
|
inline |
- Returns
- the normals of the source point cloud.
Definition at line 141 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::source_normals_.
◆ getTargetIndices()
|
inline |
- Returns
- a pointer to the vector of target indices.
Definition at line 125 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::target_indices_.
◆ getTargetNormals()
|
inline |
- Returns
- the normals of the target point cloud.
Definition at line 157 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::target_normals_.
◆ handleMatches()
|
protectedvirtual |
Method to handle current candidate matches.
Here we validate and evaluate the matches w.r.t the base and store the best fitting match (together with its score and estimated transformation).
- Note
- For forwards compatibility the results are stored in 'vectors of size 1'.
- Parameters
-
[in] base_indices indices of base B [in,out] matches vector of candidate matches w.r.t the base B. The candidate matches are reordered during this step. [out] candidates vector which contains the candidates matches M
Reimplemented in pcl::registration::KFPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >.
Definition at line 761 of file ia_fpcs.hpp.
◆ initCompute()
|
protectedvirtual |
Internal computation initialization.
Reimplemented in pcl::registration::KFPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >.
Definition at line 225 of file ia_fpcs.hpp.
References pcl::FilterIndices< PointT >::filter(), pcl::getMinMax3D(), pcl::PCLBase< PointT >::setIndices(), pcl::PCLBase< PointT >::setInputCloud(), pcl::RandomSample< PointT >::setSample(), and pcl::RandomSample< PointT >::setSeed().
Referenced by pcl::registration::KFPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::initCompute().
◆ linkMatchWithBase()
|
protectedvirtual |
Sets the correspondences between the base B and the match M by using the distance of each point to the centroid of the rectangle.
- Parameters
-
[in] base_indices indices of base B [in] match_indices indices of match M [out] correspondences resulting correspondences
- Deprecated:
- Scheduled for removal in version 1 . 18 : "this function has a bug and is generally not needed"
Definition at line 799 of file ia_fpcs.hpp.
References pcl::compute3DCentroid(), and pcl::squaredEuclideanDistance().
◆ segmentToSegmentDist()
|
protected |
Calculate intersection ratios and segment to segment distances of base diagonals.
- Parameters
-
[in] base_indices indices of base B [out] ratio diagonal intersection ratios of base points
- Returns
- quality value of diagonal intersection
Definition at line 499 of file ia_fpcs.hpp.
◆ selectBase()
|
protected |
Select an approximately coplanar set of four points from the source cloud.
- Parameters
-
[out] base_indices selected source cloud indices, further used as base (B) [out] ratio the two diagonal intersection ratios (r1,r2) of the base points
- Returns
- < 0 no coplanar four point sets with large enough sampling distance was found
- = 0 a set of four congruent points was selected
Definition at line 352 of file ia_fpcs.hpp.
References pcl::SampleConsensusModel< PointT >::setIndices().
◆ selectBaseTriangle()
|
protected |
Select randomly a triplet of points with large point-to-point distances.
The minimum point sampling distance is calculated based on the estimated point cloud overlap during initialization.
- Parameters
-
[out] base_indices indices of base B
- Returns
- < 0 no triangle with large enough base lines could be selected
- = 0 base triangle successfully selected
Definition at line 418 of file ia_fpcs.hpp.
◆ setApproxOverlap()
|
inline |
Set the approximate overlap between source and target.
- Parameters
-
[in] approx_overlap the estimated overlap
Definition at line 201 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::approx_overlap_.
◆ setDelta()
|
inline |
Set the constant factor delta which weights the internally calculated parameters.
- Parameters
-
[in] delta the weight factor delta [in] normalize flag if delta should be normalized according to point cloud density
Definition at line 183 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::delta_, and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::normalize_delta_.
◆ setMaxComputationTime()
|
inline |
Set the maximum computation time in seconds.
- Parameters
-
[in] max_runtime the maximum runtime of the method in seconds
Definition at line 266 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::max_runtime_.
◆ setMaxNormalDifference()
|
inline |
Set the maximum normal difference between valid point correspondences in degree.
- Parameters
-
[in] max_norm_diff the maximum difference in degree
Definition at line 249 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::max_norm_diff_.
◆ setNumberOfSamples()
|
inline |
Set the number of source samples to use during alignment.
- Parameters
-
[in] nr_samples the number of source samples
Definition at line 233 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::nr_samples_.
◆ setNumberOfThreads()
|
inline |
Set the number of used threads if OpenMP is activated.
- Parameters
-
[in] nr_threads the number of used threads
Definition at line 166 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::nr_threads_.
◆ setScoreThreshold()
|
inline |
Set the scoring threshold used for early finishing the method.
- Parameters
-
[in] score_threshold early terminating score criteria
Definition at line 217 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::score_threshold_.
◆ setSourceNormals()
|
inline |
Provide a pointer to the normals of the source point cloud.
- Parameters
-
[in] source_normals pointer to the normals of the source pointer cloud.
Definition at line 134 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::source_normals_.
◆ setTargetIndices()
|
inline |
Provide a pointer to the vector of target indices.
- Parameters
-
[in] target_indices a pointer to the target indices
Definition at line 118 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::target_indices_.
◆ setTargetNormals()
|
inline |
Provide a pointer to the normals of the target point cloud.
- Parameters
-
[in] target_normals point to the normals of the target point cloud.
Definition at line 150 of file ia_fpcs.h.
References pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::target_normals_.
◆ setupBase()
|
protected |
Setup the base (four coplanar points) by ordering the points and computing intersection ratios and segment to segment distances of base diagonal.
- Parameters
-
[in,out] base_indices indices of base B (will be reordered) [out] ratio diagonal intersection ratios of base points
Definition at line 456 of file ia_fpcs.hpp.
◆ validateMatch()
|
protectedvirtual |
Validate the matching by computing the transformation between the source and target based on the four matched points and by comparing the mean square error (MSE) to a threshold.
The MSE limit was calculated during initialization (max_mse_).
- Parameters
-
[in] base_indices indices of base B [in] match_indices indices of match M [in] correspondences correspondences between source and target [out] transformation resulting transformation matrix
- Returns
- < 0 MSE bigger than max_mse_
- = 0 MSE smaller than max_mse_
Definition at line 852 of file ia_fpcs.hpp.
References pcl::PointCloud< PointT >::points, pcl::squaredEuclideanDistance(), and pcl::transformPointCloud().
◆ validateTransformation()
|
protectedvirtual |
Validate the transformation by calculating the number of inliers after transforming the source cloud.
The resulting fitness score is later used as the decision criteria of the best fitting match.
- Parameters
-
[out] transformation updated orientation matrix using all inliers [out] fitness_score current best fitness_score
- Note
- fitness score is only updated if the score of the current transformation exceeds the input one.
- Returns
- < 0 if previous result is better than the current one (score remains)
- = 0 current result is better than the previous one (score updated)
Reimplemented in pcl::registration::KFPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >.
Definition at line 884 of file ia_fpcs.hpp.
References pcl::PointCloud< PointT >::begin(), pcl::PointCloud< PointT >::size(), and pcl::transformPointCloud().
Member Data Documentation
◆ approx_overlap_
|
protected |
Estimated overlap between source and target (standard = 0.5).
Definition at line 477 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getApproxOverlap(), and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setApproxOverlap().
◆ coincidation_limit_
|
protected |
◆ delta_
|
protected |
Delta value of 4pcs algorithm (standard = 1.0).
It can be used as:
- absolute value (normalization = false), value should represent the point accuracy to ensure finding neighbors between source <-> target
- relative value (normalization = true), to adjust the internally calculated point accuracy (= point density)
Definition at line 486 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getDelta(), and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setDelta().
◆ diameter_
|
protected |
◆ fitness_score_
|
protected |
Resulting fitness score of the best match.
Definition at line 506 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getFitnessScore().
◆ max_base_diameter_sqr_
|
protected |
Estimated squared metric overlap between source and target.
- Note
- Internally calculated using the estimated overlap and the extent of the source cloud. It is used to derive the minimum sampling distance of the base points as well as to calculated the number of tries to reliably find a correct match.
◆ max_edge_diff_
|
protected |
◆ max_inlier_dist_sqr_
|
protected |
◆ max_mse_
|
protected |
◆ max_norm_diff_
|
protected |
Maximum normal difference of corresponding point pairs in degrees (standard = 90).
Definition at line 499 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getMaxNormalDifference(), and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setMaxNormalDifference().
◆ max_pair_diff_
|
protected |
◆ max_runtime_
|
protected |
Maximum allowed computation time in seconds (standard = 0 => ~unlimited).
Definition at line 503 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getMaxComputationTime(), and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setMaxComputationTime().
◆ normalize_delta_
|
protected |
Normalize delta flag.
Definition at line 522 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setDelta().
◆ nr_samples_
|
protected |
The number of points to uniformly sample the source point cloud.
(standard = 0 => full cloud).
Definition at line 495 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getNumberOfSamples(), and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setNumberOfSamples().
◆ nr_threads_
|
protected |
Number of threads for parallelization (standard = 1).
- Note
- Only used if run compiled with OpenMP.
Definition at line 474 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getNumberOfThreads(), and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setNumberOfThreads().
◆ score_threshold_
|
protected |
Score threshold to stop calculation with success.
If not set by the user it depends on the size of the approximated overlap
Definition at line 491 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getScoreThreshold(), and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setScoreThreshold().
◆ small_error_
|
protected |
◆ source_indices_
|
protected |
◆ source_normals_
|
protected |
Normals of source point cloud.
Definition at line 466 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getSourceNormals(), and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setSourceNormals().
◆ target_indices_
|
protected |
A pointer to the vector of target point indices to use after sampling.
Definition at line 528 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getTargetIndices(), and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setTargetIndices().
◆ target_normals_
|
protected |
Normals of target point cloud.
Definition at line 469 of file ia_fpcs.h.
Referenced by pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::getTargetNormals(), and pcl::registration::FPCSInitialAlignment< PointSource, PointTarget, NormalT, Scalar >::setTargetNormals().
◆ use_normals_
|
protected |
The documentation for this class was generated from the following files:
- pcl/registration/ia_fpcs.h
- pcl/registration/impl/ia_fpcs.hpp