SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation. More...
#include <pcl/segmentation/sac_segmentation.h>
 Inheritance diagram for pcl::SACSegmentationFromNormals< PointT, PointNT >:
Inheritance diagram for pcl::SACSegmentationFromNormals< PointT, PointNT >: Collaboration diagram for pcl::SACSegmentationFromNormals< PointT, PointNT >:
Collaboration diagram for pcl::SACSegmentationFromNormals< PointT, PointNT >: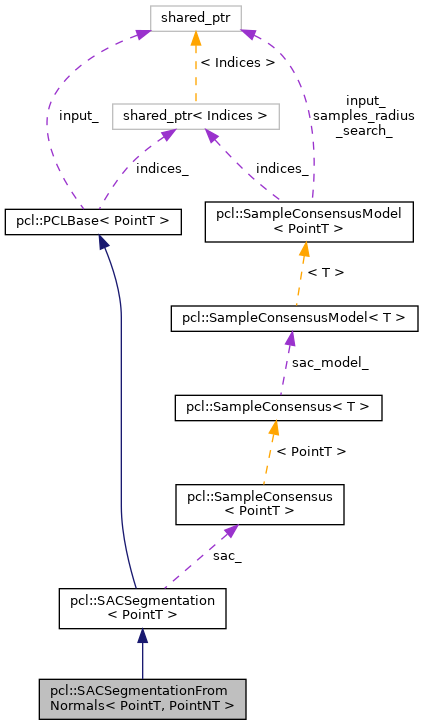
Public Member Functions | |
| SACSegmentationFromNormals (bool random=false) | |
| Empty constructor. | |
| void | setInputNormals (const PointCloudNConstPtr &normals) |
| Provide a pointer to the input dataset that contains the point normals of the XYZ dataset. | |
| PointCloudNConstPtr | getInputNormals () const |
| Get a pointer to the normals of the input XYZ point cloud dataset. | |
| void | setNormalDistanceWeight (double distance_weight) |
| Set the relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal. | |
| double | getNormalDistanceWeight () const |
| Get the relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal. | |
| void | setMinMaxOpeningAngle (const double &min_angle, const double &max_angle) |
| Set the minimum opning angle for a cone model. | |
| void | getMinMaxOpeningAngle (double &min_angle, double &max_angle) |
| Get the opening angle which we need minimum to validate a cone model. | |
| void | setDistanceFromOrigin (const double d) |
| Set the distance we expect a plane model to be from the origin. | |
| double | getDistanceFromOrigin () const |
| Get the distance of a plane model from the origin. | |
| Public Member Functions inherited from pcl::SACSegmentation< PointT > | |
| SACSegmentation (bool random=false) | |
| Empty constructor. | |
| ~SACSegmentation () override=default | |
| Empty destructor. | |
| void | setModelType (int model) |
| The type of model to use (user given parameter). | |
| int | getModelType () const |
| Get the type of SAC model used. | |
| SampleConsensusPtr | getMethod () const |
| Get a pointer to the SAC method used. | |
| SampleConsensusModelPtr | getModel () const |
| Get a pointer to the SAC model used. | |
| void | setMethodType (int method) |
| The type of sample consensus method to use (user given parameter). | |
| int | getMethodType () const |
| Get the type of sample consensus method used. | |
| void | setDistanceThreshold (double threshold) |
| Distance to the model threshold (user given parameter). | |
| double | getDistanceThreshold () const |
| Get the distance to the model threshold. | |
| void | setMaxIterations (int max_iterations) |
| Set the maximum number of iterations before giving up. | |
| int | getMaxIterations () const |
| Get maximum number of iterations before giving up. | |
| void | setProbability (double probability) |
| Set the probability of choosing at least one sample free from outliers. | |
| double | getProbability () const |
| Get the probability of choosing at least one sample free from outliers. | |
| void | setNumberOfThreads (const int nr_threads=-1) |
| Set the number of threads to use or turn off parallelization. | |
| void | setOptimizeCoefficients (bool optimize) |
| Set to true if a coefficient refinement is required. | |
| bool | getOptimizeCoefficients () const |
| Get the coefficient refinement internal flag. | |
| void | setRadiusLimits (const double &min_radius, const double &max_radius) |
| Set the minimum and maximum allowable radius limits for the model (applicable to models that estimate a radius) | |
| void | getRadiusLimits (double &min_radius, double &max_radius) |
| Get the minimum and maximum allowable radius limits for the model as set by the user. | |
| void | setSamplesMaxDist (const double &radius, SearchPtr search) |
| Set the maximum distance allowed when drawing random samples. | |
| void | getSamplesMaxDist (double &radius) |
| Get maximum distance allowed when drawing random samples. | |
| void | setAxis (const Eigen::Vector3f &ax) |
| Set the axis along which we need to search for a model perpendicular to. | |
| Eigen::Vector3f | getAxis () const |
| Get the axis along which we need to search for a model perpendicular to. | |
| void | setEpsAngle (double ea) |
| Set the angle epsilon (delta) threshold. | |
| double | getEpsAngle () const |
| Get the epsilon (delta) model angle threshold in radians. | |
| virtual void | segment (PointIndices &inliers, ModelCoefficients &model_coefficients) |
| Base method for segmentation of a model in a PointCloud given by <setInputCloud (), setIndices ()> | |
| Public Member Functions inherited from pcl::PCLBase< PointT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| bool | initSACModel (const int model_type) override |
| Initialize the Sample Consensus model and set its parameters. | |
| std::string | getClassName () const override |
| Class get name method. | |
| Protected Member Functions inherited from pcl::SACSegmentation< PointT > | |
| virtual void | initSAC (const int method_type) |
| Initialize the Sample Consensus method and set its parameters. | |
| Protected Member Functions inherited from pcl::PCLBase< PointT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Protected Attributes | |
| PointCloudNConstPtr | normals_ {nullptr} |
| A pointer to the input dataset that contains the point normals of the XYZ dataset. | |
| double | distance_weight_ {0.1} |
| The relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal. | |
| double | distance_from_origin_ {0.0} |
| The distance from the template plane to the origin. | |
| double | min_angle_ {0.0} |
| The minimum and maximum allowed opening angle of valid cone model. | |
| double | max_angle_ {M_PI_2} |
| Protected Attributes inherited from pcl::SACSegmentation< PointT > | |
| SampleConsensusModelPtr | model_ {nullptr} |
| The model that needs to be segmented. | |
| SampleConsensusPtr | sac_ {nullptr} |
| The sample consensus segmentation method. | |
| int | model_type_ {-1} |
| The type of model to use (user given parameter). | |
| int | method_type_ {0} |
| The type of sample consensus method to use (user given parameter). | |
| double | threshold_ {0.0} |
| Distance to the model threshold (user given parameter). | |
| bool | optimize_coefficients_ {true} |
| Set to true if a coefficient refinement is required. | |
| double | radius_min_ {-std::numeric_limits<double>::max()} |
| The minimum and maximum radius limits for the model. | |
| double | radius_max_ {std::numeric_limits<double>::max()} |
| double | samples_radius_ {0.0} |
| The maximum distance of subsequent samples from the first (radius search) | |
| SearchPtr | samples_radius_search_ {nullptr} |
| The search object for picking subsequent samples using radius search. | |
| double | eps_angle_ {0.0} |
| The maximum allowed difference between the model normal and the given axis. | |
| Eigen::Vector3f | axis_ {Eigen::Vector3f::Zero()} |
| The axis along which we need to search for a model perpendicular to. | |
| int | max_iterations_ {50} |
| Maximum number of iterations before giving up (user given parameter). | |
| int | threads_ {-1} |
| The number of threads the scheduler should use, or a negative number if no parallelization is wanted. | |
| double | probability_ {0.99} |
| Desired probability of choosing at least one sample free from outliers (user given parameter). | |
| bool | random_ |
| Set to true if we need a random seed. | |
| Protected Attributes inherited from pcl::PCLBase< PointT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::SACSegmentationFromNormals< PointT, PointNT >
SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation.
Definition at line 305 of file sac_segmentation.h.
Member Typedef Documentation
◆ PointCloud
| using pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloud = typename SACSegmentation<PointT>::PointCloud |
Definition at line 319 of file sac_segmentation.h.
◆ PointCloudConstPtr
| using pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloudConstPtr = typename PointCloud::ConstPtr |
Definition at line 321 of file sac_segmentation.h.
◆ PointCloudN
| using pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloudN = pcl::PointCloud<PointNT> |
Definition at line 323 of file sac_segmentation.h.
◆ PointCloudNConstPtr
| using pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloudNConstPtr = typename PointCloudN::ConstPtr |
Definition at line 325 of file sac_segmentation.h.
◆ PointCloudNPtr
| using pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloudNPtr = typename PointCloudN::Ptr |
Definition at line 324 of file sac_segmentation.h.
◆ PointCloudPtr
| using pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloudPtr = typename PointCloud::Ptr |
Definition at line 320 of file sac_segmentation.h.
◆ SampleConsensusModelFromNormalsPtr
| using pcl::SACSegmentationFromNormals< PointT, PointNT >::SampleConsensusModelFromNormalsPtr = typename SampleConsensusModelFromNormals<PointT, PointNT>::Ptr |
Definition at line 329 of file sac_segmentation.h.
◆ SampleConsensusModelPtr
| using pcl::SACSegmentationFromNormals< PointT, PointNT >::SampleConsensusModelPtr = typename SampleConsensusModel<PointT>::Ptr |
Definition at line 328 of file sac_segmentation.h.
◆ SampleConsensusPtr
| using pcl::SACSegmentationFromNormals< PointT, PointNT >::SampleConsensusPtr = typename SampleConsensus<PointT>::Ptr |
Definition at line 327 of file sac_segmentation.h.
Constructor & Destructor Documentation
◆ SACSegmentationFromNormals()
|
inline |
Empty constructor.
- Parameters
-
[in] random if true set the random seed to the current time, else set to 12345 (default: false)
Definition at line 334 of file sac_segmentation.h.
Member Function Documentation
◆ getClassName()
|
inlineoverrideprotectedvirtual |
Class get name method.
Reimplemented from pcl::SACSegmentation< PointT >.
Definition at line 414 of file sac_segmentation.h.
◆ getDistanceFromOrigin()
|
inline |
Get the distance of a plane model from the origin.
Definition at line 388 of file sac_segmentation.h.
References pcl::SACSegmentationFromNormals< PointT, PointNT >::distance_from_origin_.
◆ getInputNormals()
|
inline |
Get a pointer to the normals of the input XYZ point cloud dataset.
Definition at line 347 of file sac_segmentation.h.
References pcl::SACSegmentationFromNormals< PointT, PointNT >::normals_.
◆ getMinMaxOpeningAngle()
|
inline |
Get the opening angle which we need minimum to validate a cone model.
Definition at line 374 of file sac_segmentation.h.
References pcl::SACSegmentationFromNormals< PointT, PointNT >::max_angle_, and pcl::SACSegmentationFromNormals< PointT, PointNT >::min_angle_.
◆ getNormalDistanceWeight()
|
inline |
Get the relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal.
Definition at line 359 of file sac_segmentation.h.
References pcl::SACSegmentationFromNormals< PointT, PointNT >::distance_weight_.
◆ initSACModel()
|
overrideprotectedvirtual |
Initialize the Sample Consensus model and set its parameters.
- Parameters
-
[in] model_type the type of SAC model that is to be used
Reimplemented from pcl::SACSegmentation< PointT >.
Definition at line 374 of file sac_segmentation.hpp.
References pcl::SampleConsensusModelCone< PointT, PointNT >::getAxis(), pcl::SampleConsensusModelCylinder< PointT, PointNT >::getAxis(), pcl::SampleConsensusModelNormalParallelPlane< PointT, PointNT >::getAxis(), pcl::SampleConsensusModelNormalParallelPlane< PointT, PointNT >::getDistanceFromOrigin(), pcl::SampleConsensusModelCone< PointT, PointNT >::getEpsAngle(), pcl::SampleConsensusModelCylinder< PointT, PointNT >::getEpsAngle(), pcl::SampleConsensusModelNormalParallelPlane< PointT, PointNT >::getEpsAngle(), pcl::SampleConsensusModelCone< PointT, PointNT >::getMinMaxOpeningAngle(), pcl::SampleConsensusModelFromNormals< PointT, PointNT >::getNormalDistanceWeight(), pcl::SampleConsensusModel< PointT >::getRadiusLimits(), M_PI, pcl::SACMODEL_CONE, pcl::SACMODEL_CYLINDER, pcl::SACMODEL_NORMAL_PARALLEL_PLANE, pcl::SACMODEL_NORMAL_PLANE, pcl::SACMODEL_NORMAL_SPHERE, pcl::SampleConsensusModelCone< PointT, PointNT >::setAxis(), pcl::SampleConsensusModelCylinder< PointT, PointNT >::setAxis(), pcl::SampleConsensusModelNormalParallelPlane< PointT, PointNT >::setAxis(), pcl::SampleConsensusModelNormalParallelPlane< PointT, PointNT >::setDistanceFromOrigin(), pcl::SampleConsensusModelCylinder< PointT, PointNT >::setEpsAngle(), pcl::SampleConsensusModelNormalParallelPlane< PointT, PointNT >::setEpsAngle(), pcl::SampleConsensusModelCone< PointT, PointNT >::setEpsAngle(), pcl::SampleConsensusModelFromNormals< PointT, PointNT >::setInputNormals(), pcl::SampleConsensusModelCone< PointT, PointNT >::setMinMaxOpeningAngle(), pcl::SampleConsensusModelFromNormals< PointT, PointNT >::setNormalDistanceWeight(), and pcl::SampleConsensusModel< PointT >::setRadiusLimits().
◆ setDistanceFromOrigin()
|
inline |
Set the distance we expect a plane model to be from the origin.
- Parameters
-
[in] d distance from the template plane model to the origin
Definition at line 384 of file sac_segmentation.h.
References pcl::SACSegmentationFromNormals< PointT, PointNT >::distance_from_origin_.
◆ setInputNormals()
|
inline |
Provide a pointer to the input dataset that contains the point normals of the XYZ dataset.
- Parameters
-
[in] normals the const shared pointer to a PointCloud message
Definition at line 343 of file sac_segmentation.h.
References pcl::SACSegmentationFromNormals< PointT, PointNT >::normals_.
◆ setMinMaxOpeningAngle()
|
inline |
Set the minimum opning angle for a cone model.
- Parameters
-
min_angle the opening angle which we need minimum to validate a cone model. max_angle the opening angle which we need maximum to validate a cone model.
Definition at line 366 of file sac_segmentation.h.
References pcl::SACSegmentationFromNormals< PointT, PointNT >::max_angle_, and pcl::SACSegmentationFromNormals< PointT, PointNT >::min_angle_.
◆ setNormalDistanceWeight()
|
inline |
Set the relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal.
- Parameters
-
[in] distance_weight the distance/angular weight
Definition at line 354 of file sac_segmentation.h.
References pcl::SACSegmentationFromNormals< PointT, PointNT >::distance_weight_.
Member Data Documentation
◆ distance_from_origin_
|
protected |
The distance from the template plane to the origin.
Definition at line 400 of file sac_segmentation.h.
Referenced by pcl::SACSegmentationFromNormals< PointT, PointNT >::getDistanceFromOrigin(), and pcl::SACSegmentationFromNormals< PointT, PointNT >::setDistanceFromOrigin().
◆ distance_weight_
|
protected |
The relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal.
Definition at line 397 of file sac_segmentation.h.
Referenced by pcl::SACSegmentationFromNormals< PointT, PointNT >::getNormalDistanceWeight(), and pcl::SACSegmentationFromNormals< PointT, PointNT >::setNormalDistanceWeight().
◆ max_angle_
|
protected |
Definition at line 404 of file sac_segmentation.h.
Referenced by pcl::SACSegmentationFromNormals< PointT, PointNT >::getMinMaxOpeningAngle(), and pcl::SACSegmentationFromNormals< PointT, PointNT >::setMinMaxOpeningAngle().
◆ min_angle_
|
protected |
The minimum and maximum allowed opening angle of valid cone model.
Definition at line 403 of file sac_segmentation.h.
Referenced by pcl::SACSegmentationFromNormals< PointT, PointNT >::getMinMaxOpeningAngle(), and pcl::SACSegmentationFromNormals< PointT, PointNT >::setMinMaxOpeningAngle().
◆ normals_
|
protected |
A pointer to the input dataset that contains the point normals of the XYZ dataset.
Definition at line 392 of file sac_segmentation.h.
Referenced by pcl::SACSegmentationFromNormals< PointT, PointNT >::getInputNormals(), and pcl::SACSegmentationFromNormals< PointT, PointNT >::setInputNormals().
The documentation for this class was generated from the following files:
- pcl/segmentation/sac_segmentation.h
- pcl/segmentation/impl/sac_segmentation.hpp