The marching cubes surface reconstruction algorithm. More...
#include <pcl/surface/marching_cubes.h>
 Inheritance diagram for pcl::MarchingCubes< PointNT >:
Inheritance diagram for pcl::MarchingCubes< PointNT >: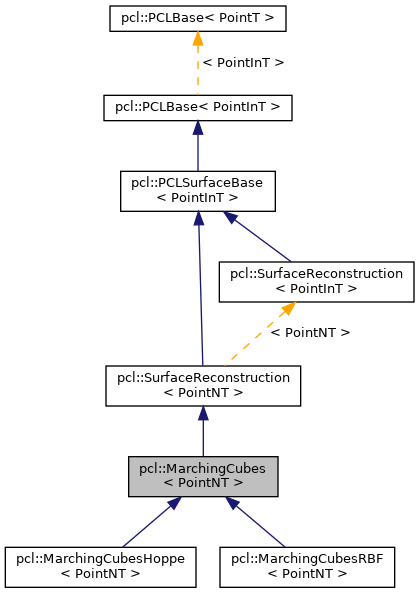 Collaboration diagram for pcl::MarchingCubes< PointNT >:
Collaboration diagram for pcl::MarchingCubes< PointNT >: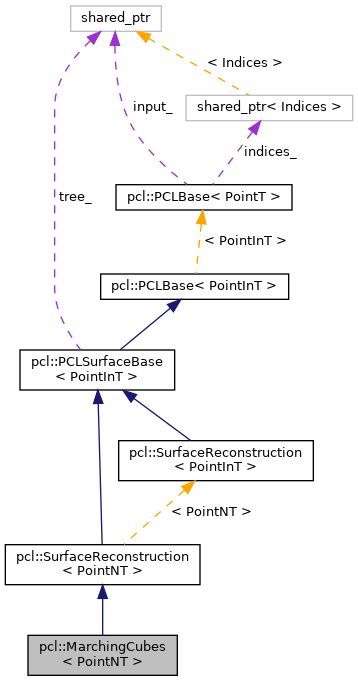
Public Types | |
| using | Ptr = shared_ptr< MarchingCubes< PointNT > > |
| using | ConstPtr = shared_ptr< const MarchingCubes< PointNT > > |
| using | PointCloudPtr = typename pcl::PointCloud< PointNT >::Ptr |
| Public Types inherited from pcl::SurfaceReconstruction< PointNT > | |
| using | Ptr = shared_ptr< SurfaceReconstruction< PointNT > > |
| using | ConstPtr = shared_ptr< const SurfaceReconstruction< PointNT > > |
| Public Types inherited from pcl::PCLSurfaceBase< PointInT > | |
| using | Ptr = shared_ptr< PCLSurfaceBase< PointInT > > |
| using | ConstPtr = shared_ptr< const PCLSurfaceBase< PointInT > > |
| using | KdTree = pcl::search::Search< PointInT > |
| using | KdTreePtr = typename KdTree::Ptr |
| Public Types inherited from pcl::PCLBase< PointInT > | |
| using | PointCloud = pcl::PointCloud< PointInT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| MarchingCubes (const float percentage_extend_grid=0.0f, const float iso_level=0.0f) | |
| Constructor. | |
| ~MarchingCubes () override | |
| Destructor. | |
| void | setIsoLevel (float iso_level) |
| Method that sets the iso level of the surface to be extracted. | |
| float | getIsoLevel () |
| Method that returns the iso level of the surface to be extracted. | |
| void | setGridResolution (int res_x, int res_y, int res_z) |
| Method that sets the marching cubes grid resolution. | |
| void | getGridResolution (int &res_x, int &res_y, int &res_z) |
| Method to get the marching cubes grid resolution. | |
| void | setPercentageExtendGrid (float percentage) |
| Method that sets the parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits. | |
| float | getPercentageExtendGrid () |
| Method that gets the parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits, as a percentage of the bounding box. | |
| Public Member Functions inherited from pcl::SurfaceReconstruction< PointNT > | |
| SurfaceReconstruction ()=default | |
| Constructor. | |
| ~SurfaceReconstruction () override=default | |
| Destructor. | |
| void | reconstruct (pcl::PolygonMesh &output) override |
| Base method for surface reconstruction for all points given in <setInputCloud (), setIndices ()> | |
| virtual void | reconstruct (pcl::PointCloud< PointNT > &points, std::vector< pcl::Vertices > &polygons) |
| Base method for surface reconstruction for all points given in <setInputCloud (), setIndices ()> | |
| Public Member Functions inherited from pcl::PCLSurfaceBase< PointInT > | |
| PCLSurfaceBase () | |
| Empty constructor. | |
| ~PCLSurfaceBase () override=default | |
| Empty destructor. | |
| void | setSearchMethod (const KdTreePtr &tree) |
| Provide an optional pointer to a search object. | |
| KdTreePtr | getSearchMethod () |
| Get a pointer to the search method used. | |
| Public Member Functions inherited from pcl::PCLBase< PointInT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointInT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| virtual void | voxelizeData ()=0 |
| Convert the point cloud into voxel data. | |
| void | interpolateEdge (Eigen::Vector3f &p1, Eigen::Vector3f &p2, float val_p1, float val_p2, Eigen::Vector3f &output) |
| Interpolate along the voxel edge. | |
| void | createSurface (const std::vector< float > &leaf_node, const Eigen::Vector3i &index_3d, pcl::PointCloud< PointNT > &cloud) |
| Calculate out the corresponding polygons in the leaf node. | |
| void | getBoundingBox () |
| Get the bounding box for the input data points. | |
| virtual float | getGridValue (Eigen::Vector3i pos) |
| Method that returns the scalar value at the given grid position. | |
| void | getNeighborList1D (std::vector< float > &leaf, Eigen::Vector3i &index3d) |
| Method that returns the scalar values of the neighbors of a given 3D position in the grid. | |
| std::string | getClassName () const override |
| Class get name method. | |
| void | performReconstruction (pcl::PolygonMesh &output) override |
| Extract the surface. | |
| void | performReconstruction (pcl::PointCloud< PointNT > &points, std::vector< pcl::Vertices > &polygons) override |
| Extract the surface. | |
| Protected Member Functions inherited from pcl::PCLBase< PointInT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Protected Attributes | |
| std::vector< float > | grid_ |
| The data structure storing the 3D grid. | |
| int | res_x_ = 32 |
| The grid resolution. | |
| int | res_y_ = 32 |
| int | res_z_ = 32 |
| Eigen::Array3f | upper_boundary_ |
| bounding box | |
| Eigen::Array3f | lower_boundary_ |
| Eigen::Array3f | size_voxel_ |
| size of voxels | |
| float | percentage_extend_grid_ |
| Parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits, as a percentage of the bounding box. | |
| float | iso_level_ |
| The iso level to be extracted. | |
| Protected Attributes inherited from pcl::SurfaceReconstruction< PointNT > | |
| bool | check_tree_ |
| A flag specifying whether or not the derived reconstruction algorithm needs the search object tree. | |
| Protected Attributes inherited from pcl::PCLSurfaceBase< PointInT > | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
| Protected Attributes inherited from pcl::PCLBase< PointInT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::MarchingCubes< PointNT >
The marching cubes surface reconstruction algorithm.
This is an abstract class that takes a grid and extracts the isosurface as a mesh, based on the original marching cubes paper:
Lorensen W.E., Cline H.E., "Marching cubes: A high resolution 3d surface construction algorithm", SIGGRAPH '87
- Template Parameters
-
PointNT Use pcl::PointNormalorpcl::PointXYZRGBNormalorpcl::PointXYZINormal
Definition at line 364 of file marching_cubes.h.
Member Typedef Documentation
◆ ConstPtr
| using pcl::MarchingCubes< PointNT >::ConstPtr = shared_ptr<const MarchingCubes<PointNT> > |
Definition at line 368 of file marching_cubes.h.
◆ PointCloudPtr
| using pcl::MarchingCubes< PointNT >::PointCloudPtr = typename pcl::PointCloud<PointNT>::Ptr |
Definition at line 373 of file marching_cubes.h.
◆ Ptr
| using pcl::MarchingCubes< PointNT >::Ptr = shared_ptr<MarchingCubes<PointNT> > |
Definition at line 367 of file marching_cubes.h.
Constructor & Destructor Documentation
◆ MarchingCubes()
|
inline |
Constructor.
Definition at line 376 of file marching_cubes.h.
◆ ~MarchingCubes()
|
overridedefault |
Destructor.
Member Function Documentation
◆ createSurface()
|
protected |
Calculate out the corresponding polygons in the leaf node.
- Parameters
-
leaf_node the leaf node to be checked index_3d the 3d index of the leaf node to be checked cloud point cloud to store the vertices of the polygon
Definition at line 81 of file marching_cubes.hpp.
References pcl::edgeTable, pcl::PointCloud< PointT >::push_back(), and pcl::triTable.
◆ getBoundingBox()
|
protected |
Get the bounding box for the input data points.
Definition at line 50 of file marching_cubes.hpp.
References pcl::getMinMax3D().
◆ getClassName()
|
inlineoverrideprotectedvirtual |
Class get name method.
Reimplemented from pcl::PCLSurfaceBase< PointInT >.
Definition at line 502 of file marching_cubes.h.
◆ getGridResolution()
|
inline |
Method to get the marching cubes grid resolution.
- Parameters
-
[in] res_x the resolution of the grid along the x-axis [in] res_y the resolution of the grid along the y-axis [in] res_z the resolution of the grid along the z-axis
Definition at line 414 of file marching_cubes.h.
References pcl::MarchingCubes< PointNT >::res_x_, pcl::MarchingCubes< PointNT >::res_y_, and pcl::MarchingCubes< PointNT >::res_z_.
◆ getGridValue()
|
protectedvirtual |
Method that returns the scalar value at the given grid position.
- Parameters
-
[in] pos The 3D position in the grid
TODO what to return?
Definition at line 190 of file marching_cubes.hpp.
◆ getIsoLevel()
|
inline |
Method that returns the iso level of the surface to be extracted.
Definition at line 396 of file marching_cubes.h.
References pcl::MarchingCubes< PointNT >::iso_level_.
◆ getNeighborList1D()
|
protected |
Method that returns the scalar values of the neighbors of a given 3D position in the grid.
- Parameters
-
[in] index3d the point in the grid [out] leaf the set of values
Definition at line 163 of file marching_cubes.hpp.
◆ getPercentageExtendGrid()
|
inline |
Method that gets the parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits, as a percentage of the bounding box.
Definition at line 431 of file marching_cubes.h.
References pcl::MarchingCubes< PointNT >::percentage_extend_grid_.
◆ interpolateEdge()
|
protected |
Interpolate along the voxel edge.
- Parameters
-
[in] p1 The first point on the edge [in] p2 The second point on the edge [in] val_p1 The scalar value at p1 [in] val_p2 The scalar value at p2 [out] output The interpolated point along the edge
Definition at line 68 of file marching_cubes.hpp.
◆ performReconstruction() [1/2]
|
overrideprotectedvirtual |
Extract the surface.
- Parameters
-
[out] points the points of the extracted mesh [out] polygons the connectivity between the point of the extracted mesh.
Implements pcl::SurfaceReconstruction< PointNT >.
Definition at line 218 of file marching_cubes.hpp.
References pcl::PointCloud< PointT >::clear(), pcl::PointCloud< PointT >::points, pcl::PointCloud< PointT >::reserve(), pcl::PointCloud< PointT >::size(), pcl::PointCloud< PointT >::swap(), and pcl::Vertices::vertices.
◆ performReconstruction() [2/2]
|
overrideprotectedvirtual |
Extract the surface.
- Parameters
-
[out] output the resultant polygonal mesh
Implements pcl::SurfaceReconstruction< PointNT >.
Definition at line 206 of file marching_cubes.hpp.
References pcl::PolygonMesh::cloud, pcl::PolygonMesh::polygons, and pcl::toPCLPointCloud2().
◆ setGridResolution()
|
inline |
Method that sets the marching cubes grid resolution.
- Parameters
-
[in] res_x the resolution of the grid along the x-axis [in] res_y the resolution of the grid along the y-axis [in] res_z the resolution of the grid along the z-axis
Definition at line 405 of file marching_cubes.h.
References pcl::MarchingCubes< PointNT >::res_x_, pcl::MarchingCubes< PointNT >::res_y_, and pcl::MarchingCubes< PointNT >::res_z_.
◆ setIsoLevel()
|
inline |
Method that sets the iso level of the surface to be extracted.
- Parameters
-
[in] iso_level the iso level.
Definition at line 391 of file marching_cubes.h.
References pcl::MarchingCubes< PointNT >::iso_level_.
◆ setPercentageExtendGrid()
|
inline |
Method that sets the parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits.
Does not affect the resolution of the grid, it just changes the voxel size accordingly.
- Parameters
-
[in] percentage the percentage of the bounding box that should be left empty between the bounding box and the grid limits.
Definition at line 424 of file marching_cubes.h.
References pcl::MarchingCubes< PointNT >::percentage_extend_grid_.
◆ voxelizeData()
|
protectedpure virtual |
Convert the point cloud into voxel data.
Implemented in pcl::MarchingCubesHoppe< PointNT >, and pcl::MarchingCubesRBF< PointNT >.
Member Data Documentation
◆ grid_
|
protected |
The data structure storing the 3D grid.
Definition at line 436 of file marching_cubes.h.
◆ iso_level_
|
protected |
The iso level to be extracted.
Definition at line 453 of file marching_cubes.h.
Referenced by pcl::MarchingCubes< PointNT >::getIsoLevel(), and pcl::MarchingCubes< PointNT >::setIsoLevel().
◆ lower_boundary_
|
protected |
Definition at line 443 of file marching_cubes.h.
◆ percentage_extend_grid_
|
protected |
Parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits, as a percentage of the bounding box.
Definition at line 450 of file marching_cubes.h.
Referenced by pcl::MarchingCubes< PointNT >::getPercentageExtendGrid(), and pcl::MarchingCubes< PointNT >::setPercentageExtendGrid().
◆ res_x_
|
protected |
The grid resolution.
Definition at line 439 of file marching_cubes.h.
Referenced by pcl::MarchingCubes< PointNT >::getGridResolution(), and pcl::MarchingCubes< PointNT >::setGridResolution().
◆ res_y_
|
protected |
Definition at line 439 of file marching_cubes.h.
Referenced by pcl::MarchingCubes< PointNT >::getGridResolution(), and pcl::MarchingCubes< PointNT >::setGridResolution().
◆ res_z_
|
protected |
Definition at line 439 of file marching_cubes.h.
Referenced by pcl::MarchingCubes< PointNT >::getGridResolution(), and pcl::MarchingCubes< PointNT >::setGridResolution().
◆ size_voxel_
|
protected |
size of voxels
Definition at line 446 of file marching_cubes.h.
◆ upper_boundary_
|
protected |
bounding box
Definition at line 442 of file marching_cubes.h.
The documentation for this class was generated from the following files:
- pcl/surface/marching_cubes.h
- pcl/surface/impl/marching_cubes.hpp