GreedyProjectionTriangulation is an implementation of a greedy triangulation algorithm for 3D points based on local 2D projections. More...
#include <pcl/surface/gp3.h>
 Inheritance diagram for pcl::GreedyProjectionTriangulation< PointInT >:
Inheritance diagram for pcl::GreedyProjectionTriangulation< PointInT >: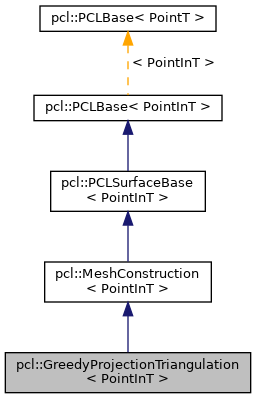 Collaboration diagram for pcl::GreedyProjectionTriangulation< PointInT >:
Collaboration diagram for pcl::GreedyProjectionTriangulation< PointInT >: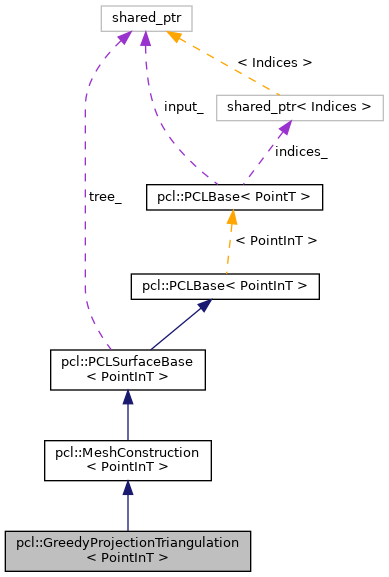
Public Member Functions | |
| GreedyProjectionTriangulation ()=default | |
| Empty constructor. | |
| void | setMu (double mu) |
| Set the multiplier of the nearest neighbor distance to obtain the final search radius for each point (this will make the algorithm adapt to different point densities in the cloud). | |
| double | getMu () const |
| Get the nearest neighbor distance multiplier. | |
| void | setMaximumNearestNeighbors (int nnn) |
| Set the maximum number of nearest neighbors to be searched for. | |
| int | getMaximumNearestNeighbors () const |
| Get the maximum number of nearest neighbors to be searched for. | |
| void | setSearchRadius (double radius) |
| Set the sphere radius that is to be used for determining the k-nearest neighbors used for triangulating. | |
| double | getSearchRadius () const |
| Get the sphere radius used for determining the k-nearest neighbors. | |
| void | setMinimumAngle (double minimum_angle) |
| Set the minimum angle each triangle should have. | |
| double | getMinimumAngle () const |
| Get the parameter for distance based weighting of neighbors. | |
| void | setMaximumAngle (double maximum_angle) |
| Set the maximum angle each triangle can have. | |
| double | getMaximumAngle () const |
| Get the parameter for distance based weighting of neighbors. | |
| void | setMaximumSurfaceAngle (double eps_angle) |
| Don't consider points for triangulation if their normal deviates more than this value from the query point's normal. | |
| double | getMaximumSurfaceAngle () const |
| Get the maximum surface angle. | |
| void | setNormalConsistency (bool consistent) |
| Set the flag if the input normals are oriented consistently. | |
| bool | getNormalConsistency () const |
| Get the flag for consistently oriented normals. | |
| void | setConsistentVertexOrdering (bool consistent_ordering) |
| Set the flag to order the resulting triangle vertices consistently (positive direction around normal). | |
| bool | getConsistentVertexOrdering () const |
| Get the flag signaling consistently ordered triangle vertices. | |
| std::vector< int > | getPointStates () const |
| Get the state of each point after reconstruction. | |
| std::vector< int > | getPartIDs () const |
| Get the ID of each point after reconstruction. | |
| pcl::Indices | getSFN () const |
| Get the sfn list. | |
| pcl::Indices | getFFN () const |
| Get the ffn list. | |
| Public Member Functions inherited from pcl::MeshConstruction< PointInT > | |
| MeshConstruction ()=default | |
| Constructor. | |
| ~MeshConstruction () override=default | |
| Destructor. | |
| void | reconstruct (pcl::PolygonMesh &output) override |
| Base method for surface reconstruction for all points given in <setInputCloud (), setIndices ()> | |
| virtual void | reconstruct (std::vector< pcl::Vertices > &polygons) |
| Base method for mesh construction for all points given in <setInputCloud (), setIndices ()> | |
| Public Member Functions inherited from pcl::PCLSurfaceBase< PointInT > | |
| PCLSurfaceBase () | |
| Empty constructor. | |
| ~PCLSurfaceBase () override=default | |
| Empty destructor. | |
| void | setSearchMethod (const KdTreePtr &tree) |
| Provide an optional pointer to a search object. | |
| KdTreePtr | getSearchMethod () |
| Get a pointer to the search method used. | |
| Public Member Functions inherited from pcl::PCLBase< PointInT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointInT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Attributes | |
| double | mu_ {0.0} |
| The nearest neighbor distance multiplier to obtain the final search radius. | |
| double | search_radius_ {0.0} |
| The nearest neighbors search radius for each point and the maximum edge length. | |
| int | nnn_ {100} |
| The maximum number of nearest neighbors accepted by searching. | |
| double | minimum_angle_ {M_PI/18} |
| The preferred minimum angle for the triangles. | |
| double | maximum_angle_ {2*M_PI/3} |
| The maximum angle for the triangles. | |
| double | eps_angle_ {M_PI/4} |
| Maximum surface angle. | |
| bool | consistent_ {false} |
| Set this to true if the normals of the input are consistently oriented. | |
| bool | consistent_ordering_ {false} |
| Set this to true if the output triangle vertices should be consistently oriented. | |
| Protected Attributes inherited from pcl::MeshConstruction< PointInT > | |
| bool | check_tree_ {true} |
| A flag specifying whether or not the derived reconstruction algorithm needs the search object tree. | |
| Protected Attributes inherited from pcl::PCLSurfaceBase< PointInT > | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
| Protected Attributes inherited from pcl::PCLBase< PointInT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Additional Inherited Members | |
| Protected Member Functions inherited from pcl::PCLBase< PointInT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Detailed Description
class pcl::GreedyProjectionTriangulation< PointInT >
GreedyProjectionTriangulation is an implementation of a greedy triangulation algorithm for 3D points based on local 2D projections.
It assumes locally smooth surfaces and relatively smooth transitions between areas with different point densities.
- Template Parameters
-
PointInT Point type must have XYZ and normal information, for example pcl::PointNormalorpcl::PointXYZRGBNormalorpcl::PointXYZINormal
Member Typedef Documentation
◆ ConstPtr
| using pcl::GreedyProjectionTriangulation< PointInT >::ConstPtr = shared_ptr<const GreedyProjectionTriangulation<PointInT> > |
◆ PointCloudIn
| using pcl::GreedyProjectionTriangulation< PointInT >::PointCloudIn = pcl::PointCloud<PointInT> |
◆ PointCloudInConstPtr
| using pcl::GreedyProjectionTriangulation< PointInT >::PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
◆ PointCloudInPtr
| using pcl::GreedyProjectionTriangulation< PointInT >::PointCloudInPtr = typename PointCloudIn::Ptr |
◆ Ptr
| using pcl::GreedyProjectionTriangulation< PointInT >::Ptr = shared_ptr<GreedyProjectionTriangulation<PointInT> > |
Member Enumeration Documentation
◆ GP3Type
| enum pcl::GreedyProjectionTriangulation::GP3Type |
Constructor & Destructor Documentation
◆ GreedyProjectionTriangulation()
|
default |
Empty constructor.
Member Function Documentation
◆ getConsistentVertexOrdering()
|
inline |
Get the flag signaling consistently ordered triangle vertices.
Definition at line 240 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::consistent_ordering_.
◆ getFFN()
|
inline |
◆ getMaximumAngle()
|
inline |
Get the parameter for distance based weighting of neighbors.
Definition at line 207 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::maximum_angle_.
◆ getMaximumNearestNeighbors()
|
inline |
Get the maximum number of nearest neighbors to be searched for.
Definition at line 174 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::nnn_.
◆ getMaximumSurfaceAngle()
|
inline |
Get the maximum surface angle.
Definition at line 219 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::eps_angle_.
◆ getMinimumAngle()
|
inline |
Get the parameter for distance based weighting of neighbors.
Definition at line 196 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::minimum_angle_.
◆ getMu()
|
inline |
Get the nearest neighbor distance multiplier.
Definition at line 164 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::mu_.
◆ getNormalConsistency()
|
inline |
Get the flag for consistently oriented normals.
Definition at line 229 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::consistent_.
◆ getPartIDs()
|
inline |
◆ getPointStates()
|
inline |
◆ getSearchRadius()
|
inline |
Get the sphere radius used for determining the k-nearest neighbors.
Definition at line 185 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::search_radius_.
◆ getSFN()
|
inline |
◆ setConsistentVertexOrdering()
|
inline |
Set the flag to order the resulting triangle vertices consistently (positive direction around normal).
- Note
- Assumes consistently oriented normals (towards the viewpoint) – see setNormalConsistency ()
- Parameters
-
[in] consistent_ordering set it to true if triangle vertices should be ordered consistently
Definition at line 236 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::consistent_ordering_.
◆ setMaximumAngle()
|
inline |
Set the maximum angle each triangle can have.
- Parameters
-
[in] maximum_angle the maximum angle each triangle can have
- Note
- For best results, its value should be around 120 degrees
Definition at line 203 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::maximum_angle_.
◆ setMaximumNearestNeighbors()
|
inline |
Set the maximum number of nearest neighbors to be searched for.
- Parameters
-
[in] nnn the maximum number of nearest neighbors
Definition at line 170 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::nnn_.
◆ setMaximumSurfaceAngle()
|
inline |
Don't consider points for triangulation if their normal deviates more than this value from the query point's normal.
- Parameters
-
[in] eps_angle maximum surface angle
- Note
- As normal estimation methods usually give smooth transitions at sharp edges, this ensures correct triangulation by avoiding connecting points from one side to points from the other through forcing the use of the edge points.
Definition at line 215 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::eps_angle_.
◆ setMinimumAngle()
|
inline |
Set the minimum angle each triangle should have.
- Parameters
-
[in] minimum_angle the minimum angle each triangle should have
- Note
- As this is a greedy approach, this will have to be violated from time to time
Definition at line 192 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::minimum_angle_.
◆ setMu()
|
inline |
Set the multiplier of the nearest neighbor distance to obtain the final search radius for each point (this will make the algorithm adapt to different point densities in the cloud).
- Parameters
-
[in] mu the multiplier
Definition at line 160 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::mu_.
◆ setNormalConsistency()
|
inline |
Set the flag if the input normals are oriented consistently.
- Parameters
-
[in] consistent set it to true if the normals are consistently oriented
Definition at line 225 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::consistent_.
◆ setSearchRadius()
|
inline |
Set the sphere radius that is to be used for determining the k-nearest neighbors used for triangulating.
- Parameters
-
[in] radius the sphere radius that is to contain all k-nearest neighbors
- Note
- This distance limits the maximum edge length!
Definition at line 181 of file gp3.h.
References pcl::GreedyProjectionTriangulation< PointInT >::search_radius_.
Member Data Documentation
◆ consistent_
|
protected |
Set this to true if the normals of the input are consistently oriented.
Definition at line 283 of file gp3.h.
Referenced by pcl::GreedyProjectionTriangulation< PointInT >::getNormalConsistency(), and pcl::GreedyProjectionTriangulation< PointInT >::setNormalConsistency().
◆ consistent_ordering_
|
protected |
Set this to true if the output triangle vertices should be consistently oriented.
Definition at line 286 of file gp3.h.
Referenced by pcl::GreedyProjectionTriangulation< PointInT >::getConsistentVertexOrdering(), and pcl::GreedyProjectionTriangulation< PointInT >::setConsistentVertexOrdering().
◆ eps_angle_
|
protected |
Maximum surface angle.
Definition at line 280 of file gp3.h.
Referenced by pcl::GreedyProjectionTriangulation< PointInT >::getMaximumSurfaceAngle(), and pcl::GreedyProjectionTriangulation< PointInT >::setMaximumSurfaceAngle().
◆ maximum_angle_
|
protected |
The maximum angle for the triangles.
Definition at line 277 of file gp3.h.
Referenced by pcl::GreedyProjectionTriangulation< PointInT >::getMaximumAngle(), and pcl::GreedyProjectionTriangulation< PointInT >::setMaximumAngle().
◆ minimum_angle_
|
protected |
The preferred minimum angle for the triangles.
Definition at line 274 of file gp3.h.
Referenced by pcl::GreedyProjectionTriangulation< PointInT >::getMinimumAngle(), and pcl::GreedyProjectionTriangulation< PointInT >::setMinimumAngle().
◆ mu_
|
protected |
The nearest neighbor distance multiplier to obtain the final search radius.
Definition at line 265 of file gp3.h.
Referenced by pcl::GreedyProjectionTriangulation< PointInT >::getMu(), and pcl::GreedyProjectionTriangulation< PointInT >::setMu().
◆ nnn_
|
protected |
The maximum number of nearest neighbors accepted by searching.
Definition at line 271 of file gp3.h.
Referenced by pcl::GreedyProjectionTriangulation< PointInT >::getMaximumNearestNeighbors(), and pcl::GreedyProjectionTriangulation< PointInT >::setMaximumNearestNeighbors().
◆ search_radius_
|
protected |
The nearest neighbors search radius for each point and the maximum edge length.
Definition at line 268 of file gp3.h.
Referenced by pcl::GreedyProjectionTriangulation< PointInT >::getSearchRadius(), and pcl::GreedyProjectionTriangulation< PointInT >::setSearchRadius().
The documentation for this class was generated from the following files: