#include <pcl/segmentation/unary_classifier.h>
 Collaboration diagram for pcl::UnaryClassifier< PointT >:
Collaboration diagram for pcl::UnaryClassifier< PointT >: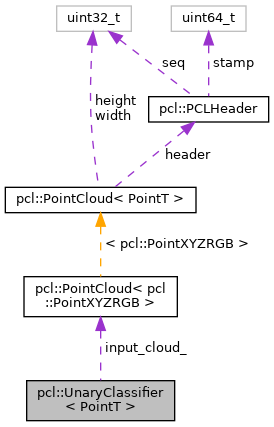
Public Member Functions | |
| UnaryClassifier () | |
| Constructor that sets default values for member variables. | |
| ~UnaryClassifier () | |
| This destructor destroys the cloud... | |
| void | setInputCloud (typename pcl::PointCloud< PointT >::Ptr input_cloud) |
| This method sets the input cloud. | |
| void | train (pcl::PointCloud< pcl::FPFHSignature33 >::Ptr &output) |
| void | trainWithLabel (std::vector< pcl::PointCloud< pcl::FPFHSignature33 >, Eigen::aligned_allocator< pcl::PointCloud< pcl::FPFHSignature33 > > > &output) |
| void | segment (pcl::PointCloud< pcl::PointXYZRGBL >::Ptr &out) |
| void | queryFeatureDistances (std::vector< pcl::PointCloud< pcl::FPFHSignature33 >::Ptr > &trained_features, pcl::PointCloud< pcl::FPFHSignature33 >::Ptr query_features, pcl::Indices &indi, std::vector< float > &dist) |
| void | assignLabels (pcl::Indices &indi, std::vector< float > &dist, int n_feature_means, float feature_threshold, pcl::PointCloud< pcl::PointXYZRGBL >::Ptr out) |
| void | setClusterSize (unsigned int k) |
| void | setNormalRadiusSearch (float param) |
| void | setFPFHRadiusSearch (float param) |
| void | setLabelField (bool l) |
| void | setTrainedFeatures (std::vector< pcl::PointCloud< pcl::FPFHSignature33 >::Ptr > &features) |
| void | setFeatureThreshold (float threshold) |
Protected Member Functions | |
| void | convertCloud (typename pcl::PointCloud< PointT >::Ptr in, pcl::PointCloud< pcl::PointXYZ >::Ptr out) |
| void | convertCloud (typename pcl::PointCloud< PointT >::Ptr in, pcl::PointCloud< pcl::PointXYZRGBL >::Ptr out) |
| void | findClusters (typename pcl::PointCloud< PointT >::Ptr in, std::vector< int > &cluster_numbers) |
| void | getCloudWithLabel (typename pcl::PointCloud< PointT >::Ptr in, pcl::PointCloud< pcl::PointXYZ >::Ptr out, int label_num) |
| void | computeFPFH (pcl::PointCloud< pcl::PointXYZ >::Ptr in, pcl::PointCloud< pcl::FPFHSignature33 >::Ptr out, float normal_radius_search, float fpfh_radius_search) |
| void | kmeansClustering (pcl::PointCloud< pcl::FPFHSignature33 >::Ptr in, pcl::PointCloud< pcl::FPFHSignature33 >::Ptr out, int k) |
Protected Attributes | |
| pcl::PointCloud< PointT >::Ptr | input_cloud_ {new pcl::PointCloud<PointT>} |
| Contains the input cloud. | |
| bool | label_field_ {false} |
| unsigned int | cluster_size_ {0} |
| float | normal_radius_search_ {0.01f} |
| float | fpfh_radius_search_ {0.05f} |
| float | feature_threshold_ {5.0} |
| std::vector< pcl::PointCloud< pcl::FPFHSignature33 >::Ptr > | trained_features_ {} |
Detailed Description
class pcl::UnaryClassifier< PointT >
Definition at line 57 of file unary_classifier.h.
Constructor & Destructor Documentation
◆ UnaryClassifier()
|
default |
Constructor that sets default values for member variables.
◆ ~UnaryClassifier()
|
default |
This destructor destroys the cloud...
Member Function Documentation
◆ assignLabels()
| void pcl::UnaryClassifier< PointT >::assignLabels | ( | pcl::Indices & | indi, |
| std::vector< float > & | dist, | ||
| int | n_feature_means, | ||
| float | feature_threshold, | ||
| pcl::PointCloud< pcl::PointXYZRGBL >::Ptr | out | ||
| ) |
Definition at line 321 of file unary_classifier.hpp.
References pcl::PointCloud< PointT >::size().
◆ computeFPFH()
|
protected |
Definition at line 196 of file unary_classifier.hpp.
References pcl::Feature< PointInT, PointOutT >::compute(), pcl::PCLBase< PointT >::setInputCloud(), pcl::NormalEstimation< PointInT, PointOutT >::setInputCloud(), pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >::setInputNormals(), pcl::Feature< PointInT, PointOutT >::setRadiusSearch(), and pcl::Feature< PointInT, PointOutT >::setSearchMethod().
◆ convertCloud() [1/2]
|
protected |
Definition at line 80 of file unary_classifier.hpp.
References pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::is_dense, pcl::PointCloud< PointT >::points, pcl::PointCloud< PointT >::size(), and pcl::PointCloud< PointT >::width.
◆ convertCloud() [2/2]
|
protected |
Definition at line 101 of file unary_classifier.hpp.
References pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::is_dense, pcl::_PointXYZRGBL::label, pcl::PointCloud< PointT >::points, pcl::PointCloud< PointT >::size(), and pcl::PointCloud< PointT >::width.
◆ findClusters()
|
protected |
Definition at line 128 of file unary_classifier.hpp.
◆ getCloudWithLabel()
|
protected |
Definition at line 161 of file unary_classifier.hpp.
References pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::is_dense, pcl::PointCloud< PointT >::push_back(), pcl::PointCloud< PointT >::size(), and pcl::PointCloud< PointT >::width.
◆ kmeansClustering()
|
protected |
Definition at line 225 of file unary_classifier.hpp.
References pcl::Kmeans::addDataPoint(), pcl::Kmeans::get_centroids(), pcl::PointCloud< PointT >::height, pcl::FPFHSignature33::histogram, pcl::PointCloud< PointT >::is_dense, pcl::Kmeans::kMeans(), pcl::PointCloud< PointT >::points, pcl::Kmeans::setClusterSize(), pcl::PointCloud< PointT >::size(), and pcl::PointCloud< PointT >::width.
◆ queryFeatureDistances()
| void pcl::UnaryClassifier< PointT >::queryFeatureDistances | ( | std::vector< pcl::PointCloud< pcl::FPFHSignature33 >::Ptr > & | trained_features, |
| pcl::PointCloud< pcl::FPFHSignature33 >::Ptr | query_features, | ||
| pcl::Indices & | indi, | ||
| std::vector< float > & | dist | ||
| ) |
Definition at line 264 of file unary_classifier.hpp.
References pcl::PointCloud< PointT >::size().
◆ segment()
| void pcl::UnaryClassifier< PointT >::segment | ( | pcl::PointCloud< pcl::PointXYZRGBL >::Ptr & | out | ) |
Definition at line 396 of file unary_classifier.hpp.
◆ setClusterSize()
|
inline |
Definition at line 98 of file unary_classifier.h.
◆ setFeatureThreshold()
|
inline |
Definition at line 113 of file unary_classifier.h.
◆ setFPFHRadiusSearch()
|
inline |
Definition at line 104 of file unary_classifier.h.
◆ setInputCloud()
| void pcl::UnaryClassifier< PointT >::setInputCloud | ( | typename pcl::PointCloud< PointT >::Ptr | input_cloud | ) |
This method sets the input cloud.
- Parameters
-
[in] input_cloud input point cloud
Definition at line 64 of file unary_classifier.hpp.
◆ setLabelField()
|
inline |
Definition at line 107 of file unary_classifier.h.
◆ setNormalRadiusSearch()
|
inline |
Definition at line 101 of file unary_classifier.h.
◆ setTrainedFeatures()
|
inline |
Definition at line 110 of file unary_classifier.h.
◆ train()
| void pcl::UnaryClassifier< PointT >::train | ( | pcl::PointCloud< pcl::FPFHSignature33 >::Ptr & | output | ) |
Definition at line 347 of file unary_classifier.hpp.
◆ trainWithLabel()
| void pcl::UnaryClassifier< PointT >::trainWithLabel | ( | std::vector< pcl::PointCloud< pcl::FPFHSignature33 >, Eigen::aligned_allocator< pcl::PointCloud< pcl::FPFHSignature33 > > > & | output | ) |
Definition at line 365 of file unary_classifier.hpp.
Member Data Documentation
◆ cluster_size_
|
protected |
Definition at line 152 of file unary_classifier.h.
◆ feature_threshold_
|
protected |
Definition at line 156 of file unary_classifier.h.
◆ fpfh_radius_search_
|
protected |
Definition at line 155 of file unary_classifier.h.
◆ input_cloud_
|
protected |
Contains the input cloud.
Definition at line 148 of file unary_classifier.h.
◆ label_field_
|
protected |
Definition at line 150 of file unary_classifier.h.
◆ normal_radius_search_
|
protected |
Definition at line 154 of file unary_classifier.h.
◆ trained_features_
|
protected |
Definition at line 159 of file unary_classifier.h.
The documentation for this class was generated from the following files:
- pcl/segmentation/unary_classifier.h
- pcl/segmentation/impl/unary_classifier.hpp