Keypoint detector for detecting corners in 3D (XYZ), 2D (intensity) AND mixed versions of these. More...
#include <pcl/keypoints/harris_6d.h>
 Inheritance diagram for pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >:
Inheritance diagram for pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >: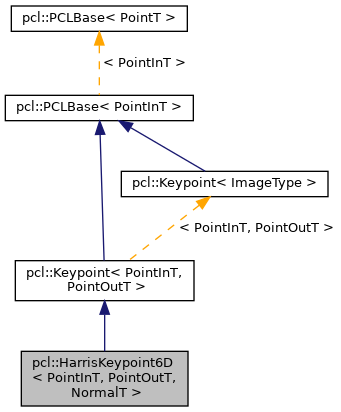 Collaboration diagram for pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >:
Collaboration diagram for pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >: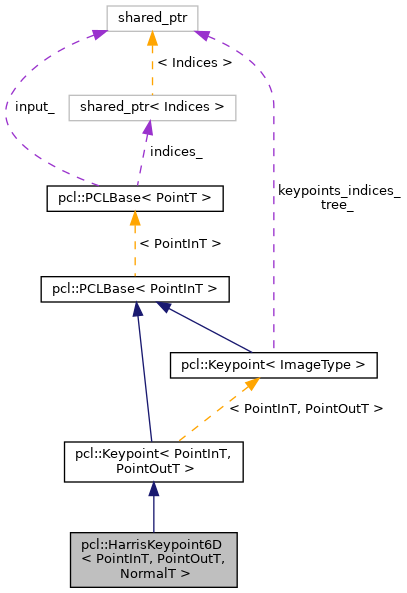
Public Types | |
| using | Ptr = shared_ptr< HarrisKeypoint6D< PointInT, PointOutT, NormalT > > |
| using | ConstPtr = shared_ptr< const HarrisKeypoint6D< PointInT, PointOutT, NormalT > > |
| using | PointCloudIn = typename Keypoint< PointInT, PointOutT >::PointCloudIn |
| using | PointCloudOut = typename Keypoint< PointInT, PointOutT >::PointCloudOut |
| using | KdTree = typename Keypoint< PointInT, PointOutT >::KdTree |
| using | PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
| Public Types inherited from pcl::Keypoint< PointInT, PointOutT > | |
| using | Ptr = shared_ptr< Keypoint< PointInT, PointOutT > > |
| using | ConstPtr = shared_ptr< const Keypoint< PointInT, PointOutT > > |
| using | BaseClass = PCLBase< PointInT > |
| using | KdTree = pcl::search::Search< PointInT > |
| using | KdTreePtr = typename KdTree::Ptr |
| using | PointCloudIn = pcl::PointCloud< PointInT > |
| using | PointCloudInPtr = typename PointCloudIn::Ptr |
| using | PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
| using | PointCloudOut = pcl::PointCloud< PointOutT > |
| using | SearchMethod = std::function< int(pcl::index_t, double, pcl::Indices &, std::vector< float > &)> |
| using | SearchMethodSurface = std::function< int(const PointCloudIn &cloud, pcl::index_t index, double, pcl::Indices &, std::vector< float > &)> |
| Public Types inherited from pcl::PCLBase< PointInT > | |
| using | PointCloud = pcl::PointCloud< PointInT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| HarrisKeypoint6D (float radius=0.01, float threshold=0.0) | |
| Constructor. | |
| virtual | ~HarrisKeypoint6D ()=default |
| Empty destructor. | |
| void | setRadius (float radius) |
| set the radius for normal estimation and non maxima suppression. | |
| void | setThreshold (float threshold) |
| set the threshold value for detecting corners. | |
| void | setNonMaxSupression (bool=false) |
| whether non maxima suppression should be applied or the response for each point should be returned | |
| void | setRefine (bool do_refine) |
| whether the detected key points should be refined or not. | |
| virtual void | setSearchSurface (const PointCloudInConstPtr &cloud) |
| void | setNumberOfThreads (unsigned int nr_threads=0) |
| Initialize the scheduler and set the number of threads to use. | |
| Public Member Functions inherited from pcl::Keypoint< PointInT, PointOutT > | |
| Keypoint ()=default | |
| Keypoint () | |
| Empty constructor. | |
| void | harrisCorner (PointInT &output, PointInT &input, const float sigma_d, const float sigma_i, const float alpha, const float thresh) |
| void | hessianBlob (PointInT &output, PointInT &input, const float sigma, bool SCALE) |
| void | hessianBlob (PointInT &output, PointInT &input, const float start_scale, const float scaling_factor, const int num_scales) |
| void | imageElementMultiply (PointInT &output, PointInT &input1, PointInT &input2) |
| ~Keypoint () override=default | |
| Empty destructor. | |
| virtual void | setSearchSurface (const PointCloudInConstPtr &cloud) |
| Provide a pointer to the input dataset that we need to estimate features at every point for. | |
| PointCloudInConstPtr | getSearchSurface () |
| Get a pointer to the surface point cloud dataset. | |
| void | setSearchMethod (const KdTreePtr &tree) |
| Provide a pointer to the search object. | |
| KdTreePtr | getSearchMethod () |
| Get a pointer to the search method used. | |
| double | getSearchParameter () |
| Get the internal search parameter. | |
| void | setKSearch (int k) |
| Set the number of k nearest neighbors to use for the feature estimation. | |
| int | getKSearch () |
| get the number of k nearest neighbors used for the feature estimation. | |
| void | setRadiusSearch (double radius) |
| Set the sphere radius that is to be used for determining the nearest neighbors used for the key point detection. | |
| double | getRadiusSearch () |
| Get the sphere radius used for determining the neighbors. | |
| pcl::PointIndicesConstPtr | getKeypointsIndices () |
| void | compute (PointCloudOut &output) |
| Base method for key point detection for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
| int | searchForNeighbors (pcl::index_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface. | |
| Public Member Functions inherited from pcl::PCLBase< PointInT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointInT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| void | detectKeypoints (PointCloudOut &output) |
| void | responseTomasi (PointCloudOut &output) const |
| void | refineCorners (PointCloudOut &corners) const |
| void | calculateCombinedCovar (const pcl::Indices &neighbors, float *coefficients) const |
| Protected Member Functions inherited from pcl::Keypoint< PointInT, PointOutT > | |
| virtual bool | initCompute () |
| const std::string & | getClassName () const |
| Get a string representation of the name of this class. | |
| virtual void | detectKeypoints (PointCloudOut &output)=0 |
| Abstract key point detection method. | |
| Protected Member Functions inherited from pcl::PCLBase< PointInT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Additional Inherited Members | |
| Protected Attributes inherited from pcl::Keypoint< PointInT, PointOutT > | |
| std::string | name_ |
| The key point detection method's name. | |
| SearchMethod | search_method_ |
| The search method template for indices. | |
| SearchMethodSurface | search_method_surface_ |
| The search method template for points. | |
| PointCloudInConstPtr | surface_ |
| An input point cloud describing the surface that is to be used for nearest neighbors estimation. | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
| double | search_parameter_ |
| The actual search parameter (casted from either search_radius_ or k_). | |
| double | search_radius_ |
| The nearest neighbors search radius for each point. | |
| int | k_ |
| The number of K nearest neighbors to use for each point. | |
| pcl::PointIndicesPtr | keypoints_indices_ |
| Indices of the keypoints in the input cloud. | |
| Protected Attributes inherited from pcl::PCLBase< PointInT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >
Keypoint detector for detecting corners in 3D (XYZ), 2D (intensity) AND mixed versions of these.
Definition at line 50 of file harris_6d.h.
Member Typedef Documentation
◆ ConstPtr
| using pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::ConstPtr = shared_ptr<const HarrisKeypoint6D<PointInT, PointOutT, NormalT> > |
Definition at line 54 of file harris_6d.h.
◆ KdTree
| using pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::KdTree = typename Keypoint<PointInT, PointOutT>::KdTree |
Definition at line 58 of file harris_6d.h.
◆ PointCloudIn
| using pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::PointCloudIn = typename Keypoint<PointInT, PointOutT>::PointCloudIn |
Definition at line 56 of file harris_6d.h.
◆ PointCloudInConstPtr
| using pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
Definition at line 59 of file harris_6d.h.
◆ PointCloudOut
| using pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::PointCloudOut = typename Keypoint<PointInT, PointOutT>::PointCloudOut |
Definition at line 57 of file harris_6d.h.
◆ Ptr
| using pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::Ptr = shared_ptr<HarrisKeypoint6D<PointInT, PointOutT, NormalT> > |
Definition at line 53 of file harris_6d.h.
Constructor & Destructor Documentation
◆ HarrisKeypoint6D()
|
inline |
Constructor.
- Parameters
-
radius the radius for normal estimation as well as for non maxima suppression threshold the threshold to filter out weak corners
Definition at line 76 of file harris_6d.h.
References pcl::Keypoint< PointInT, PointOutT >::name_, and pcl::Keypoint< PointInT, PointOutT >::search_radius_.
◆ ~HarrisKeypoint6D()
|
virtualdefault |
Empty destructor.
Member Function Documentation
◆ calculateCombinedCovar()
|
protected |
Definition at line 76 of file harris_6d.hpp.
◆ detectKeypoints()
|
protected |
Definition at line 143 of file harris_6d.hpp.
References pcl::Feature< PointInT, PointOutT >::compute(), pcl::copyPointCloud(), pcl::PointCloud< PointT >::is_dense, pcl::isFinite(), pcl::PointCloud< PointT >::points, pcl::PointCloud< PointT >::resize(), pcl::PCLBase< PointT >::setInputCloud(), pcl::NormalEstimation< PointInT, PointOutT >::setInputCloud(), pcl::IntegralImageNormalEstimation< PointInT, PointOutT >::setInputCloud(), pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >::setInputNormals(), pcl::IntegralImageNormalEstimation< PointInT, PointOutT >::setNormalEstimationMethod(), pcl::IntegralImageNormalEstimation< PointInT, PointOutT >::setNormalSmoothingSize(), pcl::Feature< PointInT, PointOutT >::setRadiusSearch(), and pcl::PointCloud< PointT >::size().
◆ refineCorners()
|
protected |
Definition at line 358 of file harris_6d.hpp.
References pcl::search::radius_search, and pcl::search::Search< PointT >::radiusSearch().
◆ responseTomasi()
|
protected |
Definition at line 268 of file harris_6d.hpp.
References pcl::isFinite().
◆ setNonMaxSupression()
| void pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::setNonMaxSupression | ( | bool | nonmax = false | ) |
whether non maxima suppression should be applied or the response for each point should be returned
- Note
- this value needs to be turned on in order to apply thresholding and refinement
- Parameters
-
nonmax default is false
Definition at line 69 of file harris_6d.hpp.
◆ setNumberOfThreads()
|
inline |
Initialize the scheduler and set the number of threads to use.
- Parameters
-
nr_threads the number of hardware threads to use (0 sets the value back to automatic)
Definition at line 123 of file harris_6d.h.
◆ setRadius()
| void pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::setRadius | ( | float | radius | ) |
set the radius for normal estimation and non maxima suppression.
- Parameters
-
radius
Definition at line 57 of file harris_6d.hpp.
◆ setRefine()
| void pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::setRefine | ( | bool | do_refine | ) |
whether the detected key points should be refined or not.
If turned of, the key points are a subset of the original point cloud. Otherwise the key points may be arbitrary.
note non maxima suppression needs to be on in order to use this feature.
- Parameters
-
do_refine
Definition at line 63 of file harris_6d.hpp.
◆ setSearchSurface()
|
inlinevirtual |
Definition at line 117 of file harris_6d.h.
References pcl::PointCloud< PointT >::clear(), and pcl::Keypoint< PointInT, PointOutT >::surface_.
◆ setThreshold()
| void pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::setThreshold | ( | float | threshold | ) |
set the threshold value for detecting corners.
This is only evaluated if non maxima suppression is turned on.
note non maxima suppression needs to be activated in order to use this feature.
- Parameters
-
threshold
Definition at line 51 of file harris_6d.hpp.
The documentation for this class was generated from the following files:
- pcl/keypoints/harris_6d.h
- pcl/keypoints/impl/harris_6d.hpp