ConvexHull using libqhull library. More...
#include <pcl/surface/convex_hull.h>
 Inheritance diagram for pcl::ConvexHull< PointInT >:
Inheritance diagram for pcl::ConvexHull< PointInT >: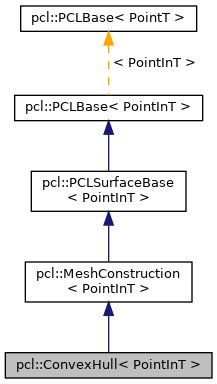 Collaboration diagram for pcl::ConvexHull< PointInT >:
Collaboration diagram for pcl::ConvexHull< PointInT >: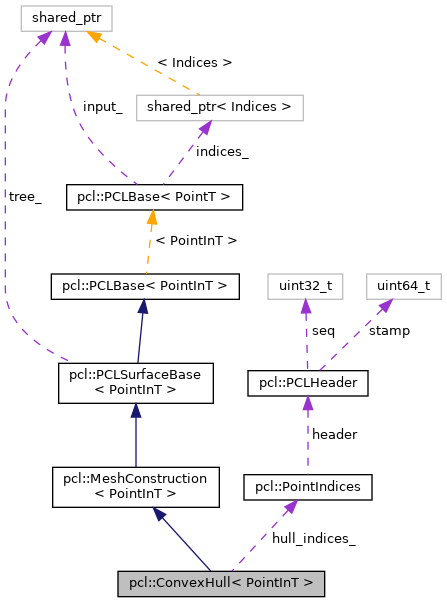
Public Types | |
| using | Ptr = shared_ptr< ConvexHull< PointInT > > |
| using | ConstPtr = shared_ptr< const ConvexHull< PointInT > > |
| using | PointCloud = pcl::PointCloud< PointInT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| Public Types inherited from pcl::MeshConstruction< PointInT > | |
| using | Ptr = shared_ptr< MeshConstruction< PointInT > > |
| using | ConstPtr = shared_ptr< const MeshConstruction< PointInT > > |
| Public Types inherited from pcl::PCLSurfaceBase< PointInT > | |
| using | Ptr = shared_ptr< PCLSurfaceBase< PointInT > > |
| using | ConstPtr = shared_ptr< const PCLSurfaceBase< PointInT > > |
| using | KdTree = pcl::search::Search< PointInT > |
| using | KdTreePtr = typename KdTree::Ptr |
| Public Types inherited from pcl::PCLBase< PointInT > | |
| using | PointCloud = pcl::PointCloud< PointInT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| ConvexHull ()=default | |
| Empty constructor. | |
| ~ConvexHull () override=default | |
| Empty destructor. | |
| void | reconstruct (PointCloud &points, std::vector< pcl::Vertices > &polygons) |
| Compute a convex hull for all points given. | |
| void | reconstruct (PointCloud &points) |
| Compute a convex hull for all points given. | |
| void | setComputeAreaVolume (bool value) |
| If set to true, the qhull library is called to compute the total area and volume of the convex hull. | |
| double | getTotalArea () const |
| Returns the total area of the convex hull. | |
| double | getTotalVolume () const |
| Returns the total volume of the convex hull. | |
| void | setDimension (int dimension) |
| Sets the dimension on the input data, 2D or 3D. | |
| int | getDimension () const |
| Returns the dimensionality (2 or 3) of the calculated hull. | |
| void | getHullPointIndices (pcl::PointIndices &hull_point_indices) const |
| Retrieve the indices of the input point cloud that for the convex hull. | |
| Public Member Functions inherited from pcl::MeshConstruction< PointInT > | |
| MeshConstruction ()=default | |
| Constructor. | |
| ~MeshConstruction () override=default | |
| Destructor. | |
| void | reconstruct (pcl::PolygonMesh &output) override |
| Base method for surface reconstruction for all points given in <setInputCloud (), setIndices ()> | |
| virtual void | reconstruct (std::vector< pcl::Vertices > &polygons) |
| Base method for mesh construction for all points given in <setInputCloud (), setIndices ()> | |
| Public Member Functions inherited from pcl::PCLSurfaceBase< PointInT > | |
| PCLSurfaceBase () | |
| Empty constructor. | |
| ~PCLSurfaceBase () override=default | |
| Empty destructor. | |
| void | setSearchMethod (const KdTreePtr &tree) |
| Provide an optional pointer to a search object. | |
| KdTreePtr | getSearchMethod () |
| Get a pointer to the search method used. | |
| Public Member Functions inherited from pcl::PCLBase< PointInT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointInT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| void | performReconstruction (PointCloud &points, std::vector< pcl::Vertices > &polygons, bool fill_polygon_data=false) |
| The actual reconstruction method. | |
| void | performReconstruction2D (PointCloud &points, std::vector< pcl::Vertices > &polygons, bool fill_polygon_data=false) |
| The reconstruction method for 2D data. | |
| void | performReconstruction3D (PointCloud &points, std::vector< pcl::Vertices > &polygons, bool fill_polygon_data=false) |
| The reconstruction method for 3D data. | |
| void | performReconstruction (PolygonMesh &output) override |
| A reconstruction method that returns a polygonmesh. | |
| void | performReconstruction (std::vector< pcl::Vertices > &polygons) override |
| A reconstruction method that returns the polygon of the convex hull. | |
| void | calculateInputDimension () |
| Automatically determines the dimension of input data - 2D or 3D. | |
| std::string | getClassName () const override |
| Class get name method. | |
| Protected Member Functions inherited from pcl::PCLBase< PointInT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Protected Attributes | |
| bool | compute_area_ {false} |
| double | total_area_ {0.0} |
| double | total_volume_ {0.0} |
| int | dimension_ {0} |
| The dimensionality of the concave hull (2D or 3D). | |
| double | projection_angle_thresh_ {std::cos (0.174532925)} |
| How close can a 2D plane's normal be to an axis to make projection problematic. | |
| std::string | qhull_flags {"qhull "} |
| Option flag string to be used calling qhull. | |
| const Eigen::Vector3d | x_axis_ {1.0, 0.0, 0.0} |
| const Eigen::Vector3d | y_axis_ {0.0, 1.0, 0.0} |
| const Eigen::Vector3d | z_axis_ {0.0, 0.0, 1.0} |
| pcl::PointIndices | hull_indices_ |
| Protected Attributes inherited from pcl::MeshConstruction< PointInT > | |
| bool | check_tree_ {true} |
| A flag specifying whether or not the derived reconstruction algorithm needs the search object tree. | |
| Protected Attributes inherited from pcl::PCLSurfaceBase< PointInT > | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
| Protected Attributes inherited from pcl::PCLBase< PointInT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::ConvexHull< PointInT >
ConvexHull using libqhull library.
Definition at line 72 of file convex_hull.h.
Member Typedef Documentation
◆ ConstPtr
| using pcl::ConvexHull< PointInT >::ConstPtr = shared_ptr<const ConvexHull<PointInT> > |
Definition at line 82 of file convex_hull.h.
◆ PointCloud
| using pcl::ConvexHull< PointInT >::PointCloud = pcl::PointCloud<PointInT> |
Definition at line 86 of file convex_hull.h.
◆ PointCloudConstPtr
| using pcl::ConvexHull< PointInT >::PointCloudConstPtr = typename PointCloud::ConstPtr |
Definition at line 88 of file convex_hull.h.
◆ PointCloudPtr
| using pcl::ConvexHull< PointInT >::PointCloudPtr = typename PointCloud::Ptr |
Definition at line 87 of file convex_hull.h.
◆ Ptr
| using pcl::ConvexHull< PointInT >::Ptr = shared_ptr<ConvexHull<PointInT> > |
Definition at line 81 of file convex_hull.h.
Constructor & Destructor Documentation
◆ ConvexHull()
|
default |
Empty constructor.
◆ ~ConvexHull()
|
overridedefault |
Empty destructor.
Member Function Documentation
◆ calculateInputDimension()
|
protected |
Automatically determines the dimension of input data - 2D or 3D.
Definition at line 57 of file convex_hull.hpp.
References pcl::compute3DCentroid(), pcl::computeCovarianceMatrixNormalized(), and pcl::eigen33().
◆ getClassName()
|
inlineoverrideprotectedvirtual |
Class get name method.
Reimplemented from pcl::PCLSurfaceBase< PointInT >.
Definition at line 230 of file convex_hull.h.
Referenced by pcl::ConvexHull< PointInT >::setDimension().
◆ getDimension()
|
inline |
Returns the dimensionality (2 or 3) of the calculated hull.
Definition at line 160 of file convex_hull.h.
References pcl::ConvexHull< PointInT >::dimension_.
◆ getHullPointIndices()
| void pcl::ConvexHull< PointInT >::getHullPointIndices | ( | pcl::PointIndices & | hull_point_indices | ) | const |
Retrieve the indices of the input point cloud that for the convex hull.
- Note
- Should only be called after reconstruction was performed.
- Parameters
-
[out] hull_point_indices The indices of the points forming the point cloud
Definition at line 508 of file convex_hull.hpp.
◆ getTotalArea()
|
inline |
Returns the total area of the convex hull.
Definition at line 132 of file convex_hull.h.
References pcl::ConvexHull< PointInT >::total_area_.
◆ getTotalVolume()
|
inline |
Returns the total volume of the convex hull.
Only valid for 3-dimensional sets. For 2D-sets volume is zero.
Definition at line 141 of file convex_hull.h.
References pcl::ConvexHull< PointInT >::total_volume_.
◆ performReconstruction() [1/3]
|
protected |
The actual reconstruction method.
- Parameters
-
[out] points the resultant points lying on the convex hull [out] polygons the resultant convex hull polygons, as a set of vertices. The Vertices structure contains an array of point indices. [in] fill_polygon_data true if polygons should be filled, false otherwise
Definition at line 430 of file convex_hull.hpp.
◆ performReconstruction() [2/3]
|
overrideprotectedvirtual |
A reconstruction method that returns a polygonmesh.
- Parameters
-
[out] output a PolygonMesh representing the convex hull of the input data.
Implements pcl::MeshConstruction< PointInT >.
Definition at line 468 of file convex_hull.hpp.
References pcl::PolygonMesh::cloud, pcl::PolygonMesh::polygons, and pcl::toPCLPointCloud2().
◆ performReconstruction() [3/3]
|
overrideprotectedvirtual |
A reconstruction method that returns the polygon of the convex hull.
- Parameters
-
[out] polygons the polygon(s) representing the convex hull of the input data.
Implements pcl::MeshConstruction< PointInT >.
Definition at line 480 of file convex_hull.hpp.
◆ performReconstruction2D()
|
protected |
The reconstruction method for 2D data.
Does not require dimension to be set.
- Parameters
-
[out] points the resultant points lying on the convex hull [out] polygons the resultant convex hull polygons, as a set of vertices. The Vertices structure contains an array of point indices. [in] fill_polygon_data true if polygons should be filled, false otherwise
Definition at line 76 of file convex_hull.hpp.
References pcl::PointCloud< PointT >::clear(), pcl::comparePoints2D(), pcl::compute3DCentroid(), pcl::computeCovarianceMatrixNormalized(), pcl::eigen33(), pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::is_dense, pcl::console::isVerbosityLevelEnabled(), pcl::isXYZFinite(), pcl::console::L_DEBUG, pcl::PointCloud< PointT >::resize(), pcl::PointCloud< PointT >::size(), and pcl::PointCloud< PointT >::width.
◆ performReconstruction3D()
|
protected |
The reconstruction method for 3D data.
Does not require dimension to be set.
- Parameters
-
[out] points the resultant points lying on the convex hull [out] polygons the resultant convex hull polygons, as a set of vertices. The Vertices structure contains an array of point indices. [in] fill_polygon_data true if polygons should be filled, false otherwise
Definition at line 297 of file convex_hull.hpp.
References pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::is_dense, pcl::console::isVerbosityLevelEnabled(), pcl::console::L_DEBUG, pcl::PointCloud< PointT >::resize(), pcl::PointCloud< PointT >::size(), and pcl::PointCloud< PointT >::width.
◆ reconstruct() [1/2]
| void pcl::ConvexHull< PointInT >::reconstruct | ( | PointCloud & | points | ) |
Compute a convex hull for all points given.
- Parameters
-
[out] points the resultant points lying on the convex hull.
Definition at line 445 of file convex_hull.hpp.
References pcl::PointCloud< PointT >::clear(), pcl::PointCloud< PointT >::header, pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::is_dense, pcl::PointCloud< PointT >::size(), and pcl::PointCloud< PointT >::width.
◆ reconstruct() [2/2]
| void pcl::ConvexHull< PointInT >::reconstruct | ( | PointCloud & | points, |
| std::vector< pcl::Vertices > & | polygons | ||
| ) |
Compute a convex hull for all points given.
- Note
- In 2D case (i.e. if the input points belong to one plane) the polygons vector will have a single item, whereas in 3D case it will contain one item for each hull facet.
- Parameters
-
[out] points the resultant points lying on the convex hull. [out] polygons the resultant convex hull polygons, as a set of vertices. The Vertices structure contains an array of point indices.
Definition at line 488 of file convex_hull.hpp.
References pcl::PointCloud< PointT >::clear(), pcl::PointCloud< PointT >::header, pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::is_dense, pcl::PointCloud< PointT >::size(), and pcl::PointCloud< PointT >::width.
◆ setComputeAreaVolume()
|
inline |
If set to true, the qhull library is called to compute the total area and volume of the convex hull.
NOTE: When this option is activated, the qhull library produces output to the console.
- Parameters
-
[in] value whether to compute the area and the volume, default is false
Definition at line 121 of file convex_hull.h.
References pcl::ConvexHull< PointInT >::compute_area_, and pcl::ConvexHull< PointInT >::qhull_flags.
◆ setDimension()
|
inline |
Sets the dimension on the input data, 2D or 3D.
- Parameters
-
[in] dimension The dimension of the input data. If not set, this will be determined automatically.
Definition at line 150 of file convex_hull.h.
References pcl::ConvexHull< PointInT >::dimension_, and pcl::ConvexHull< PointInT >::getClassName().
Member Data Documentation
◆ compute_area_
|
protected |
Definition at line 236 of file convex_hull.h.
Referenced by pcl::ConvexHull< PointInT >::setComputeAreaVolume().
◆ dimension_
|
protected |
The dimensionality of the concave hull (2D or 3D).
Definition at line 245 of file convex_hull.h.
Referenced by pcl::ConvexHull< PointInT >::getDimension(), and pcl::ConvexHull< PointInT >::setDimension().
◆ hull_indices_
|
protected |
Definition at line 263 of file convex_hull.h.
◆ projection_angle_thresh_
|
protected |
How close can a 2D plane's normal be to an axis to make projection problematic.
Definition at line 248 of file convex_hull.h.
◆ qhull_flags
|
protected |
Option flag string to be used calling qhull.
Definition at line 251 of file convex_hull.h.
Referenced by pcl::ConvexHull< PointInT >::setComputeAreaVolume().
◆ total_area_
|
protected |
Definition at line 239 of file convex_hull.h.
Referenced by pcl::ConvexHull< PointInT >::getTotalArea().
◆ total_volume_
|
protected |
Definition at line 242 of file convex_hull.h.
Referenced by pcl::ConvexHull< PointInT >::getTotalVolume().
◆ x_axis_
|
protected |
Definition at line 254 of file convex_hull.h.
◆ y_axis_
|
protected |
Definition at line 257 of file convex_hull.h.
◆ z_axis_
|
protected |
Definition at line 260 of file convex_hull.h.
The documentation for this class was generated from the following files:
- pcl/surface/convex_hull.h
- pcl/surface/impl/convex_hull.hpp