#include <pcl/recognition/ransac_based/model_library.h>
|
| class | Model |
| | Stores some information about the model. More...
|
| |
Definition at line 57 of file model_library.h.
◆ HashTable
◆ HashTableCell
◆ node_data_pair_list
◆ PointCloudIn
◆ PointCloudN
◆ ModelLibrary()
| pcl::recognition::ModelLibrary::ModelLibrary |
( |
float |
pair_width, |
|
|
float |
voxel_size, |
|
|
float |
max_coplanarity_angle = 3.0f *AUX_DEG_TO_RADIANS |
|
) |
| |
This class is used by 'ObjRecRANSAC' to maintain the object models to be recognized.
Normally, you do not need to use this class directly.
◆ ~ModelLibrary()
| virtual pcl::recognition::ModelLibrary::~ModelLibrary |
( |
| ) |
|
|
inlinevirtual |
◆ addModel()
| bool pcl::recognition::ModelLibrary::addModel |
( |
const PointCloudIn & |
points, |
|
|
const PointCloudN & |
normals, |
|
|
const std::string & |
object_name, |
|
|
float |
frac_of_points_for_registration, |
|
|
void * |
user_data = nullptr |
|
) |
| |
Adds a model to the hash table.
- Parameters
-
| [in] | points | represents the model to be added. |
| [in] | normals | are the normals at the model points. |
| [in] | object_name | is the unique name of the object to be added. |
| [in] | frac_of_points_for_registration | is the number of points used for fast ICP registration prior to hypothesis testing |
| [in] | user_data | is a pointer to some data (can be NULL) |
Returns true if model successfully added and false otherwise (e.g., if object_name is not unique).
◆ addToHashTable()
Returns true if the oriented point pair was added to the hash table and false otherwise.
◆ clear()
| void pcl::recognition::ModelLibrary::clear |
( |
| ) |
|
|
protected |
Removes all models from the library and destroys the hash table.
This method should be called upon destroying this object.
◆ getHashTable()
| const HashTable & pcl::recognition::ModelLibrary::getHashTable |
( |
| ) |
const |
|
inline |
Returns the hash table built by this instance.
Definition at line 227 of file model_library.h.
◆ getModel()
| const Model * pcl::recognition::ModelLibrary::getModel |
( |
const std::string & |
name | ) |
const |
|
inline |
◆ getModels()
| const std::map< std::string, Model * > & pcl::recognition::ModelLibrary::getModels |
( |
| ) |
const |
|
inline |
◆ ignoreCoplanarPointPairsOff()
| void pcl::recognition::ModelLibrary::ignoreCoplanarPointPairsOff |
( |
| ) |
|
|
inline |
Call this method in order to add all point pairs (co-planar as well) to the hash table.
The default behavior is ignoring co-planar points on.
Definition at line 207 of file model_library.h.
◆ ignoreCoplanarPointPairsOn()
| void pcl::recognition::ModelLibrary::ignoreCoplanarPointPairsOn |
( |
| ) |
|
|
inline |
Call this method in order NOT to add co-planar point pairs to the hash table.
The default behavior is ignoring co-planar points on.
Definition at line 199 of file model_library.h.
◆ removeAllModels()
| void pcl::recognition::ModelLibrary::removeAllModels |
( |
| ) |
|
Removes all models from the library and clears the hash table.
◆ setMaxCoplanarityAngleDegrees()
| void pcl::recognition::ModelLibrary::setMaxCoplanarityAngleDegrees |
( |
float |
max_coplanarity_angle_degrees | ) |
|
|
inline |
This is a threshold.
The larger the value the more point pairs will be considered as co-planar and will be ignored in the off-line model pre-processing and in the online recognition phases. This makes sense only if "ignore co-planar points" is on. Call this method before calling addModel.
Definition at line 191 of file model_library.h.
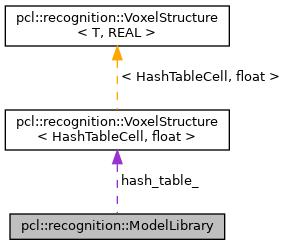
◆ hash_table_
| HashTable pcl::recognition::ModelLibrary::hash_table_ |
|
protected |
◆ ignore_coplanar_opps_
| bool pcl::recognition::ModelLibrary::ignore_coplanar_opps_ {true} |
|
protected |
◆ max_coplanarity_angle_
| float pcl::recognition::ModelLibrary::max_coplanarity_angle_ |
|
protected |
◆ models_
| std::map<std::string,Model*> pcl::recognition::ModelLibrary::models_ |
|
protected |
◆ num_of_cells_
| int pcl::recognition::ModelLibrary::num_of_cells_[3] |
|
protected |
◆ pair_width_
| float pcl::recognition::ModelLibrary::pair_width_ |
|
protected |
◆ voxel_size_
| float pcl::recognition::ModelLibrary::voxel_size_ |
|
protected |
The documentation for this class was generated from the following file:
 Collaboration diagram for pcl::recognition::ModelLibrary:
Collaboration diagram for pcl::recognition::ModelLibrary: