Stores some information about the model.
More...
#include <pcl/recognition/ransac_based/model_library.h>
Stores some information about the model.
Definition at line 64 of file model_library.h.
◆ Model()
| pcl::recognition::ModelLibrary::Model::Model |
( |
const PointCloudIn & |
points, |
|
|
const PointCloudN & |
normals, |
|
|
float |
voxel_size, |
|
|
const std::string & |
object_name, |
|
|
float |
frac_of_points_for_registration, |
|
|
void * |
user_data = nullptr |
|
) |
| |
|
inline |
◆ ~Model()
| virtual pcl::recognition::ModelLibrary::Model::~Model |
( |
| ) |
|
|
virtualdefault |
◆ getBoundsOfOctreePoints()
| const float * pcl::recognition::ModelLibrary::Model::getBoundsOfOctreePoints |
( |
| ) |
const |
|
inline |
◆ getObjectName()
| const std::string & pcl::recognition::ModelLibrary::Model::getObjectName |
( |
| ) |
const |
|
inline |
◆ getOctree()
| const ORROctree & pcl::recognition::ModelLibrary::Model::getOctree |
( |
| ) |
const |
|
inline |
◆ getOctreeCenterOfMass()
| const float * pcl::recognition::ModelLibrary::Model::getOctreeCenterOfMass |
( |
| ) |
const |
|
inline |
◆ getPointsForRegistration()
| const PointCloudIn & pcl::recognition::ModelLibrary::Model::getPointsForRegistration |
( |
| ) |
const |
|
inline |
◆ getUserData()
| void * pcl::recognition::ModelLibrary::Model::getUserData |
( |
| ) |
const |
|
inline |
◆ bounds_of_octree_points_
| float pcl::recognition::ModelLibrary::Model::bounds_of_octree_points_[6] |
|
protected |
◆ obj_name_
| const std::string pcl::recognition::ModelLibrary::Model::obj_name_ |
|
protected |
◆ octree_
| ORROctree pcl::recognition::ModelLibrary::Model::octree_ |
|
protected |
◆ octree_center_of_mass_
| float pcl::recognition::ModelLibrary::Model::octree_center_of_mass_[3] |
|
protected |
◆ points_for_registration_
| PointCloudIn pcl::recognition::ModelLibrary::Model::points_for_registration_ |
|
protected |
◆ user_data_
| void* pcl::recognition::ModelLibrary::Model::user_data_ |
|
protected |
The documentation for this class was generated from the following file:
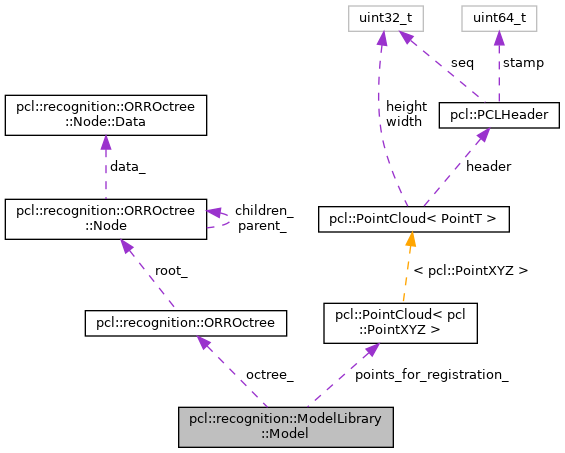
 Collaboration diagram for pcl::recognition::ModelLibrary::Model:
Collaboration diagram for pcl::recognition::ModelLibrary::Model: