GroundBasedPeopleDetectionApp performs people detection on RGB-D data having as input the ground plane coefficients. More...
#include <pcl/people/ground_based_people_detection_app.h>
 Collaboration diagram for pcl::people::GroundBasedPeopleDetectionApp< PointT >:
Collaboration diagram for pcl::people::GroundBasedPeopleDetectionApp< PointT >: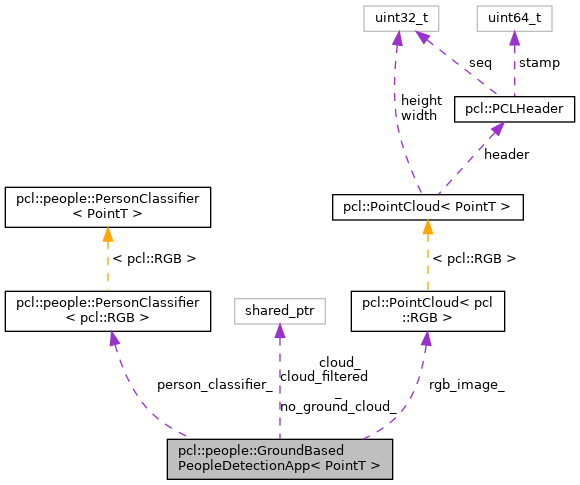
Public Types | |
| using | PointCloud = pcl::PointCloud< PointT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
Public Member Functions | |
| GroundBasedPeopleDetectionApp () | |
| Constructor. | |
| virtual | ~GroundBasedPeopleDetectionApp () |
| Destructor. | |
| void | setInputCloud (PointCloudPtr &cloud) |
| Set the pointer to the input cloud. | |
| void | setGround (Eigen::VectorXf &ground_coeffs) |
| Set the ground coefficients. | |
| void | setTransformation (const Eigen::Matrix3f &transformation) |
| Set the transformation matrix, which is used in order to transform the given point cloud, the ground plane and the intrinsics matrix to the internal coordinate frame. | |
| void | setSamplingFactor (int sampling_factor) |
| Set sampling factor. | |
| void | setVoxelSize (float voxel_size) |
| Set voxel size. | |
| void | setIntrinsics (Eigen::Matrix3f intrinsics_matrix) |
| Set intrinsic parameters of the RGB camera. | |
| void | setClassifier (pcl::people::PersonClassifier< pcl::RGB > person_classifier) |
| Set SVM-based person classifier. | |
| void | setFOV (float min, float max) |
| Set the field of view of the point cloud in z direction. | |
| void | setSensorPortraitOrientation (bool vertical) |
| Set sensor orientation (vertical = true means portrait mode, vertical = false means landscape mode). | |
| void | setHeadCentroid (bool head_centroid) |
| Set head_centroid_ to true (person centroid is in the head) or false (person centroid is the whole body centroid). | |
| void | setPersonClusterLimits (float min_height, float max_height, float min_width, float max_width) |
| Set minimum and maximum allowed height and width for a person cluster. | |
| void | setMinimumDistanceBetweenHeads (float heads_minimum_distance) |
| Set minimum distance between persons' heads. | |
| void | getPersonClusterLimits (float &min_height, float &max_height, float &min_width, float &max_width) |
| Get the minimum and maximum allowed height and width for a person cluster. | |
| void | getDimensionLimits (int &min_points, int &max_points) |
| Get minimum and maximum allowed number of points for a person cluster. | |
| float | getMinimumDistanceBetweenHeads () |
| Get minimum distance between persons' heads. | |
| Eigen::VectorXf | getGround () |
| Get floor coefficients. | |
| PointCloudPtr | getFilteredCloud () |
| Get the filtered point cloud. | |
| PointCloudPtr | getNoGroundCloud () |
| Get pointcloud after voxel grid filtering and ground removal. | |
| void | extractRGBFromPointCloud (PointCloudPtr input_cloud, pcl::PointCloud< pcl::RGB >::Ptr &output_cloud) |
| Extract RGB information from a point cloud and output the corresponding RGB point cloud. | |
| void | swapDimensions (pcl::PointCloud< pcl::RGB >::Ptr &cloud) |
| Swap rows/cols dimensions of a RGB point cloud (90 degrees counterclockwise rotation). | |
| void | updateMinMaxPoints () |
| Estimates min_points_ and max_points_ based on the minimal and maximal cluster size and the voxel size. | |
| void | applyTransformationPointCloud () |
| Applies the transformation to the input point cloud. | |
| void | applyTransformationGround () |
| Applies the transformation to the ground plane. | |
| void | applyTransformationIntrinsics () |
| Applies the transformation to the intrinsics matrix. | |
| void | filter () |
| Reduces the input cloud to one point per voxel and limits the field of view. | |
| bool | compute (std::vector< pcl::people::PersonCluster< PointT > > &clusters) |
| Perform people detection on the input data and return people clusters information. | |
Protected Attributes | |
| int | sampling_factor_ |
| sampling factor used to downsample the point cloud | |
| float | voxel_size_ |
| voxel size | |
| Eigen::VectorXf | ground_coeffs_ |
| ground plane coefficients | |
| bool | ground_coeffs_set_ |
| flag stating whether the ground coefficients have been set or not | |
| Eigen::VectorXf | ground_coeffs_transformed_ |
| the transformed ground coefficients | |
| float | sqrt_ground_coeffs_ |
| ground plane normalization factor | |
| Eigen::Matrix3f | transformation_ |
| rotation matrix which transforms input point cloud to internal people tracker coordinate frame | |
| bool | transformation_set_ |
| flag stating whether the transformation matrix has been set or not | |
| PointCloudPtr | cloud_ |
| pointer to the input cloud | |
| PointCloudPtr | cloud_filtered_ |
| pointer to the filtered cloud | |
| PointCloudPtr | no_ground_cloud_ |
| pointer to the cloud after voxel grid filtering and ground removal | |
| pcl::PointCloud< pcl::RGB >::Ptr | rgb_image_ |
| pointer to a RGB cloud corresponding to cloud_ | |
| float | max_height_ |
| person clusters maximum height from the ground plane | |
| float | min_height_ |
| person clusters minimum height from the ground plane | |
| float | max_width_ |
| person clusters maximum width, used to estimate how many points maximally represent a person cluster | |
| float | min_width_ |
| person clusters minimum width, used to estimate how many points minimally represent a person cluster | |
| float | min_fov_ |
| the beginning of the field of view in z-direction, should be usually set to zero | |
| float | max_fov_ |
| the end of the field of view in z-direction | |
| bool | vertical_ |
| if true, the sensor is considered to be vertically placed (portrait mode) | |
| bool | head_centroid_ |
| if true, the person centroid is computed as the centroid of the cluster points belonging to the head; if false, the person centroid is computed as the centroid of the whole cluster points (default = true) | |
| int | max_points_ |
| maximum number of points for a person cluster | |
| int | min_points_ |
| minimum number of points for a person cluster | |
| float | heads_minimum_distance_ |
| minimum distance between persons' heads | |
| Eigen::Matrix3f | intrinsics_matrix_ |
| intrinsic parameters matrix of the RGB camera | |
| bool | intrinsics_matrix_set_ |
| flag stating whether the intrinsics matrix has been set or not | |
| Eigen::Matrix3f | intrinsics_matrix_transformed_ |
| the transformed intrinsics matrix | |
| pcl::people::PersonClassifier< pcl::RGB > | person_classifier_ |
| SVM-based person classifier. | |
| bool | person_classifier_set_flag_ |
| flag stating if the classifier has been set or not | |
Detailed Description
class pcl::people::GroundBasedPeopleDetectionApp< PointT >
GroundBasedPeopleDetectionApp performs people detection on RGB-D data having as input the ground plane coefficients.
It implements the people detection algorithm described here: M. Munaro, F. Basso and E. Menegatti, Tracking people within groups with RGB-D data, In Proceedings of the International Conference on Intelligent Robots and Systems (IROS) 2012, Vilamoura (Portugal), 2012.
Definition at line 68 of file ground_based_people_detection_app.h.
Member Typedef Documentation
◆ PointCloud
| using pcl::people::GroundBasedPeopleDetectionApp< PointT >::PointCloud = pcl::PointCloud<PointT> |
Definition at line 72 of file ground_based_people_detection_app.h.
◆ PointCloudConstPtr
| using pcl::people::GroundBasedPeopleDetectionApp< PointT >::PointCloudConstPtr = typename PointCloud::ConstPtr |
Definition at line 74 of file ground_based_people_detection_app.h.
◆ PointCloudPtr
| using pcl::people::GroundBasedPeopleDetectionApp< PointT >::PointCloudPtr = typename PointCloud::Ptr |
Definition at line 73 of file ground_based_people_detection_app.h.
Constructor & Destructor Documentation
◆ GroundBasedPeopleDetectionApp()
| pcl::people::GroundBasedPeopleDetectionApp< PointT >::GroundBasedPeopleDetectionApp | ( | ) |
Constructor.
Definition at line 50 of file ground_based_people_detection_app.hpp.
◆ ~GroundBasedPeopleDetectionApp()
|
virtualdefault |
Destructor.
Member Function Documentation
◆ applyTransformationGround()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::applyTransformationGround | ( | ) |
Applies the transformation to the ground plane.
Definition at line 271 of file ground_based_people_detection_app.hpp.
◆ applyTransformationIntrinsics()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::applyTransformationIntrinsics | ( | ) |
Applies the transformation to the intrinsics matrix.
Definition at line 286 of file ground_based_people_detection_app.hpp.
◆ applyTransformationPointCloud()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::applyTransformationPointCloud | ( | ) |
Applies the transformation to the input point cloud.
Definition at line 260 of file ground_based_people_detection_app.hpp.
References pcl::transformPointCloud().
◆ compute()
| bool pcl::people::GroundBasedPeopleDetectionApp< PointT >::compute | ( | std::vector< pcl::people::PersonCluster< PointT > > & | clusters | ) |
Perform people detection on the input data and return people clusters information.
- Parameters
-
[out] clusters Vector of PersonCluster.
- Returns
- true if the compute operation is successful, false otherwise.
Definition at line 311 of file ground_based_people_detection_app.hpp.
References pcl::EuclideanClusterExtraction< PointT >::extract(), pcl::FilterIndices< PointT >::filter(), pcl::SampleConsensusModelPlane< PointT >::optimizeModelCoefficients(), pcl::SampleConsensusModelPlane< PointT >::selectWithinDistance(), pcl::EuclideanClusterExtraction< PointT >::setClusterTolerance(), pcl::people::HeadBasedSubclustering< PointT >::setGround(), pcl::people::HeadBasedSubclustering< PointT >::setHeightLimits(), pcl::PCLBase< PointT >::setIndices(), pcl::people::HeadBasedSubclustering< PointT >::setInitialClusters(), pcl::PCLBase< PointT >::setInputCloud(), pcl::people::HeadBasedSubclustering< PointT >::setInputCloud(), pcl::EuclideanClusterExtraction< PointT >::setMaxClusterSize(), pcl::EuclideanClusterExtraction< PointT >::setMinClusterSize(), pcl::people::HeadBasedSubclustering< PointT >::setMinimumDistanceBetweenHeads(), pcl::FilterIndices< PointT >::setNegative(), pcl::people::HeadBasedSubclustering< PointT >::setSensorPortraitOrientation(), and pcl::people::HeadBasedSubclustering< PointT >::subcluster().
◆ extractRGBFromPointCloud()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::extractRGBFromPointCloud | ( | PointCloudPtr | input_cloud, |
| pcl::PointCloud< pcl::RGB >::Ptr & | output_cloud | ||
| ) |
Extract RGB information from a point cloud and output the corresponding RGB point cloud.
- Parameters
-
[in] input_cloud A pointer to a point cloud containing also RGB information. [out] output_cloud A pointer to a RGB point cloud.
Definition at line 222 of file ground_based_people_detection_app.hpp.
References pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::points, and pcl::PointCloud< PointT >::width.
◆ filter()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::filter | ( | ) |
Reduces the input cloud to one point per voxel and limits the field of view.
Definition at line 299 of file ground_based_people_detection_app.hpp.
References pcl::Filter< PointT >::filter(), pcl::VoxelGrid< PointT >::setFilterFieldName(), pcl::VoxelGrid< PointT >::setFilterLimits(), pcl::PCLBase< PointT >::setInputCloud(), and pcl::VoxelGrid< PointT >::setLeafSize().
◆ getDimensionLimits()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::getDimensionLimits | ( | int & | min_points, |
| int & | max_points | ||
| ) |
Get minimum and maximum allowed number of points for a person cluster.
- Parameters
-
[out] min_points Minimum allowed number of points for a person cluster. [out] max_points Maximum allowed number of points for a person cluster.
Definition at line 187 of file ground_based_people_detection_app.hpp.
◆ getFilteredCloud()
| pcl::people::GroundBasedPeopleDetectionApp< PointT >::PointCloudPtr pcl::people::GroundBasedPeopleDetectionApp< PointT >::getFilteredCloud | ( | ) |
Get the filtered point cloud.
Definition at line 210 of file ground_based_people_detection_app.hpp.
◆ getGround()
| Eigen::VectorXf pcl::people::GroundBasedPeopleDetectionApp< PointT >::getGround | ( | ) |
Get floor coefficients.
Definition at line 200 of file ground_based_people_detection_app.hpp.
◆ getMinimumDistanceBetweenHeads()
| float pcl::people::GroundBasedPeopleDetectionApp< PointT >::getMinimumDistanceBetweenHeads | ( | ) |
Get minimum distance between persons' heads.
Definition at line 194 of file ground_based_people_detection_app.hpp.
◆ getNoGroundCloud()
| pcl::people::GroundBasedPeopleDetectionApp< PointT >::PointCloudPtr pcl::people::GroundBasedPeopleDetectionApp< PointT >::getNoGroundCloud | ( | ) |
Get pointcloud after voxel grid filtering and ground removal.
Definition at line 216 of file ground_based_people_detection_app.hpp.
◆ getPersonClusterLimits()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::getPersonClusterLimits | ( | float & | min_height, |
| float & | max_height, | ||
| float & | min_width, | ||
| float & | max_width | ||
| ) |
Get the minimum and maximum allowed height and width for a person cluster.
- Parameters
-
[out] min_height Minimum allowed height for a person cluster. [out] max_height Maximum allowed height for a person cluster. [out] min_width Minimum width for a person cluster. [out] max_width Maximum width for a person cluster.
Definition at line 178 of file ground_based_people_detection_app.hpp.
◆ setClassifier()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setClassifier | ( | pcl::people::PersonClassifier< pcl::RGB > | person_classifier | ) |
Set SVM-based person classifier.
- Parameters
-
[in] person_classifier Needed for people detection on RGB data.
Definition at line 129 of file ground_based_people_detection_app.hpp.
◆ setFOV()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setFOV | ( | float | min, |
| float | max | ||
| ) |
Set the field of view of the point cloud in z direction.
- Parameters
-
[in] min The beginning of the field of view in z-direction, should be usually set to zero. [in] max The end of the field of view in z-direction.
Definition at line 136 of file ground_based_people_detection_app.hpp.
◆ setGround()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setGround | ( | Eigen::VectorXf & | ground_coeffs | ) |
Set the ground coefficients.
- Parameters
-
[in] ground_coeffs Vector containing the four plane coefficients.
Definition at line 99 of file ground_based_people_detection_app.hpp.
◆ setHeadCentroid()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setHeadCentroid | ( | bool | head_centroid | ) |
Set head_centroid_ to true (person centroid is in the head) or false (person centroid is the whole body centroid).
- Parameters
-
[in] head_centroid Set the location of the person centroid (head or body center) (default = true).
Definition at line 172 of file ground_based_people_detection_app.hpp.
◆ setInputCloud()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setInputCloud | ( | PointCloudPtr & | cloud | ) |
Set the pointer to the input cloud.
- Parameters
-
[in] cloud A pointer to the input cloud.
Definition at line 79 of file ground_based_people_detection_app.hpp.
◆ setIntrinsics()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setIntrinsics | ( | Eigen::Matrix3f | intrinsics_matrix | ) |
Set intrinsic parameters of the RGB camera.
- Parameters
-
[in] intrinsics_matrix RGB camera intrinsic parameters matrix.
Definition at line 121 of file ground_based_people_detection_app.hpp.
◆ setMinimumDistanceBetweenHeads()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setMinimumDistanceBetweenHeads | ( | float | heads_minimum_distance | ) |
Set minimum distance between persons' heads.
- Parameters
-
[in] heads_minimum_distance Minimum allowed distance between persons' heads (default = 0.3).
Definition at line 166 of file ground_based_people_detection_app.hpp.
◆ setPersonClusterLimits()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setPersonClusterLimits | ( | float | min_height, |
| float | max_height, | ||
| float | min_width, | ||
| float | max_width | ||
| ) |
Set minimum and maximum allowed height and width for a person cluster.
- Parameters
-
[in] min_height Minimum allowed height for a person cluster (default = 1.3). [in] max_height Maximum allowed height for a person cluster (default = 2.3). [in] min_width Minimum width for a person cluster (default = 0.1). [in] max_width Maximum width for a person cluster (default = 8.0).
Definition at line 156 of file ground_based_people_detection_app.hpp.
◆ setSamplingFactor()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setSamplingFactor | ( | int | sampling_factor | ) |
Set sampling factor.
- Parameters
-
[in] sampling_factor Value of the downsampling factor (in each dimension) which is applied to the raw point cloud (default = 1.).
Definition at line 108 of file ground_based_people_detection_app.hpp.
◆ setSensorPortraitOrientation()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setSensorPortraitOrientation | ( | bool | vertical | ) |
Set sensor orientation (vertical = true means portrait mode, vertical = false means landscape mode).
- Parameters
-
[in] vertical Set landscape/portrait camera orientation (default = false).
Definition at line 143 of file ground_based_people_detection_app.hpp.
◆ setTransformation()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setTransformation | ( | const Eigen::Matrix3f & | transformation | ) |
Set the transformation matrix, which is used in order to transform the given point cloud, the ground plane and the intrinsics matrix to the internal coordinate frame.
- Parameters
-
[in] transformation
Definition at line 85 of file ground_based_people_detection_app.hpp.
◆ setVoxelSize()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::setVoxelSize | ( | float | voxel_size | ) |
Set voxel size.
- Parameters
-
[in] voxel_size Value of the voxel dimension (default = 0.06m.).
Definition at line 114 of file ground_based_people_detection_app.hpp.
◆ swapDimensions()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::swapDimensions | ( | pcl::PointCloud< pcl::RGB >::Ptr & | cloud | ) |
Swap rows/cols dimensions of a RGB point cloud (90 degrees counterclockwise rotation).
- Parameters
-
[in,out] cloud A pointer to a RGB point cloud.
Definition at line 243 of file ground_based_people_detection_app.hpp.
References pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::points, and pcl::PointCloud< PointT >::width.
◆ updateMinMaxPoints()
| void pcl::people::GroundBasedPeopleDetectionApp< PointT >::updateMinMaxPoints | ( | ) |
Estimates min_points_ and max_points_ based on the minimal and maximal cluster size and the voxel size.
Definition at line 149 of file ground_based_people_detection_app.hpp.
Member Data Documentation
◆ cloud_
|
protected |
pointer to the input cloud
Definition at line 308 of file ground_based_people_detection_app.h.
◆ cloud_filtered_
|
protected |
pointer to the filtered cloud
Definition at line 311 of file ground_based_people_detection_app.h.
◆ ground_coeffs_
|
protected |
ground plane coefficients
Definition at line 290 of file ground_based_people_detection_app.h.
◆ ground_coeffs_set_
|
protected |
flag stating whether the ground coefficients have been set or not
Definition at line 293 of file ground_based_people_detection_app.h.
◆ ground_coeffs_transformed_
|
protected |
the transformed ground coefficients
Definition at line 296 of file ground_based_people_detection_app.h.
◆ head_centroid_
|
protected |
if true, the person centroid is computed as the centroid of the cluster points belonging to the head;
if false, the person centroid is computed as the centroid of the whole cluster points (default = true)
Definition at line 342 of file ground_based_people_detection_app.h.
◆ heads_minimum_distance_
|
protected |
minimum distance between persons' heads
Definition at line 351 of file ground_based_people_detection_app.h.
◆ intrinsics_matrix_
|
protected |
intrinsic parameters matrix of the RGB camera
Definition at line 354 of file ground_based_people_detection_app.h.
◆ intrinsics_matrix_set_
|
protected |
flag stating whether the intrinsics matrix has been set or not
Definition at line 357 of file ground_based_people_detection_app.h.
◆ intrinsics_matrix_transformed_
|
protected |
the transformed intrinsics matrix
Definition at line 360 of file ground_based_people_detection_app.h.
◆ max_fov_
|
protected |
the end of the field of view in z-direction
Definition at line 335 of file ground_based_people_detection_app.h.
◆ max_height_
|
protected |
person clusters maximum height from the ground plane
Definition at line 320 of file ground_based_people_detection_app.h.
◆ max_points_
|
protected |
maximum number of points for a person cluster
Definition at line 345 of file ground_based_people_detection_app.h.
◆ max_width_
|
protected |
person clusters maximum width, used to estimate how many points maximally represent a person cluster
Definition at line 326 of file ground_based_people_detection_app.h.
◆ min_fov_
|
protected |
the beginning of the field of view in z-direction, should be usually set to zero
Definition at line 332 of file ground_based_people_detection_app.h.
◆ min_height_
|
protected |
person clusters minimum height from the ground plane
Definition at line 323 of file ground_based_people_detection_app.h.
◆ min_points_
|
protected |
minimum number of points for a person cluster
Definition at line 348 of file ground_based_people_detection_app.h.
◆ min_width_
|
protected |
person clusters minimum width, used to estimate how many points minimally represent a person cluster
Definition at line 329 of file ground_based_people_detection_app.h.
◆ no_ground_cloud_
|
protected |
pointer to the cloud after voxel grid filtering and ground removal
Definition at line 314 of file ground_based_people_detection_app.h.
◆ person_classifier_
|
protected |
SVM-based person classifier.
Definition at line 363 of file ground_based_people_detection_app.h.
◆ person_classifier_set_flag_
|
protected |
flag stating if the classifier has been set or not
Definition at line 366 of file ground_based_people_detection_app.h.
◆ rgb_image_
|
protected |
pointer to a RGB cloud corresponding to cloud_
Definition at line 317 of file ground_based_people_detection_app.h.
◆ sampling_factor_
|
protected |
sampling factor used to downsample the point cloud
Definition at line 284 of file ground_based_people_detection_app.h.
◆ sqrt_ground_coeffs_
|
protected |
ground plane normalization factor
Definition at line 299 of file ground_based_people_detection_app.h.
◆ transformation_
|
protected |
rotation matrix which transforms input point cloud to internal people tracker coordinate frame
Definition at line 302 of file ground_based_people_detection_app.h.
◆ transformation_set_
|
protected |
flag stating whether the transformation matrix has been set or not
Definition at line 305 of file ground_based_people_detection_app.h.
◆ vertical_
|
protected |
if true, the sensor is considered to be vertically placed (portrait mode)
Definition at line 338 of file ground_based_people_detection_app.h.
◆ voxel_size_
|
protected |
voxel size
Definition at line 287 of file ground_based_people_detection_app.h.
The documentation for this class was generated from the following files:
- pcl/people/ground_based_people_detection_app.h
- pcl/people/impl/ground_based_people_detection_app.hpp