#include </__w/1/s/gpu/people/include/pcl/gpu/people/people_detector.h>
 Collaboration diagram for pcl::gpu::people::PeopleDetector:
Collaboration diagram for pcl::gpu::people::PeopleDetector: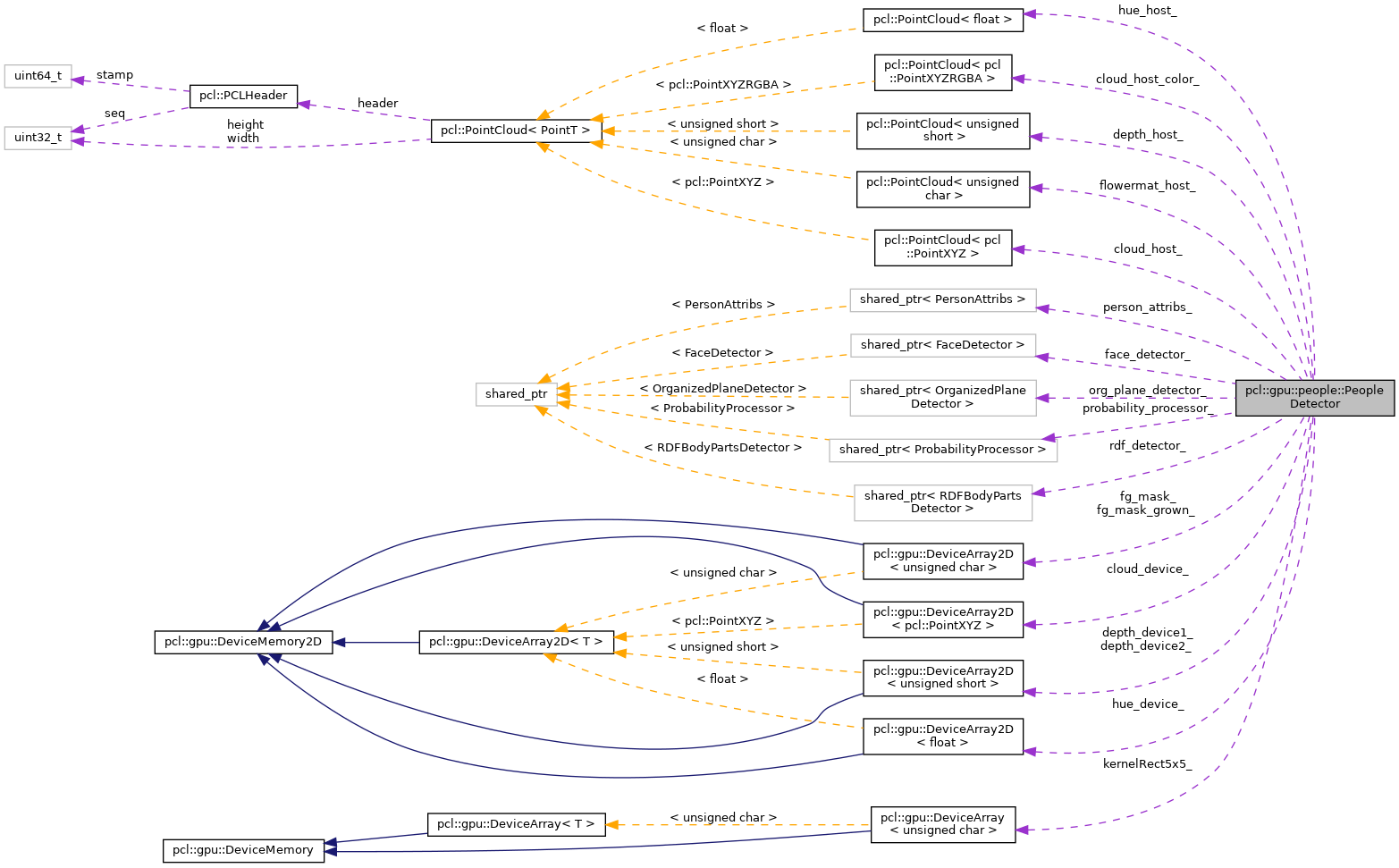
Public Types | |
| using | Ptr = shared_ptr< PeopleDetector > |
| using | ConstPtr = shared_ptr< const PeopleDetector > |
| using | PointTC = pcl::PointXYZRGBA |
| using | PointT = pcl::PointXYZ |
| using | Depth = DeviceArray2D< unsigned short > |
| using | Image = DeviceArray2D< pcl::RGB > |
| using | Labels = DeviceArray2D< unsigned char > |
| using | Mask = DeviceArray2D< unsigned char > |
| using | Hue = DeviceArray2D< float > |
Public Member Functions | |
| PeopleDetector () | |
| Class constructor. | |
| void | setIntrinsics (float fx, float fy, float cx=-1, float cy=-1) |
| User must set non standard intrinsics. | |
| int | process (const PointCloud< PointTC >::ConstPtr &cloud) |
| Possible will be removed because of extra overheads. | |
| int | processProb (const PointCloud< PointTC >::ConstPtr &cloud) |
| int | process (const Depth &depth, const Image &rgba) |
| void | setDeltaHueTolerance (unsigned int delta_hue_tolerance) |
| Set the tolerance for the delta on the Hue in Seeded Hue Segmentation step. | |
| unsigned int | getDeltaHueTolerance () const |
| Get the tolerance for the delta on the Hue in Seeded Hue Segmentation step, defaults to 5. | |
| const std::string | getClassName () const |
| Class getName method. | |
| int | process () |
| int | processProb () |
| Process the depth based on probabilities supporting tracking, person specific files used. | |
| void | allocate_buffers (int rows=480, int cols=640) |
| void | shs5 (const pcl::PointCloud< PointT > &cloud, const pcl::Indices &indices, unsigned char *mask) |
Public Attributes | |
| RDFBodyPartsDetector::Ptr | rdf_detector_ |
| OrganizedPlaneDetector::Ptr | org_plane_detector_ |
| FaceDetector::Ptr | face_detector_ |
| PersonAttribs::Ptr | person_attribs_ |
| ProbabilityProcessor::Ptr | probability_processor_ |
| bool | first_iteration_ |
| indicates first time callback (allows for tracking features to start from second frame) | |
| float | fx_ |
| float | fy_ |
| float | cx_ |
| float | cy_ |
| unsigned int | delta_hue_tolerance_ |
| DeviceArray< unsigned char > | kernelRect5x5_ |
| PointCloud< PointT > | cloud_host_ |
| PointCloud< PointTC > | cloud_host_color_ |
| PointCloud< float > | hue_host_ |
| PointCloud< unsigned short > | depth_host_ |
| PointCloud< unsigned char > | flowermat_host_ |
| DeviceArray2D< PointT > | cloud_device_ |
| Hue | hue_device_ |
| Depth | depth_device1_ |
| Depth | depth_device2_ |
| Mask | fg_mask_ |
| Mask | fg_mask_grown_ |
Friends | |
| class | PeoplePCDApp |
| !! only for debug purposes TODO: remove this. | |
Detailed Description
Definition at line 62 of file people_detector.h.
Member Typedef Documentation
◆ ConstPtr
| using pcl::gpu::people::PeopleDetector::ConstPtr = shared_ptr<const PeopleDetector> |
Definition at line 66 of file people_detector.h.
◆ Depth
| using pcl::gpu::people::PeopleDetector::Depth = DeviceArray2D<unsigned short> |
Definition at line 70 of file people_detector.h.
◆ Hue
| using pcl::gpu::people::PeopleDetector::Hue = DeviceArray2D<float> |
Definition at line 119 of file people_detector.h.
◆ Image
Definition at line 71 of file people_detector.h.
◆ Labels
| using pcl::gpu::people::PeopleDetector::Labels = DeviceArray2D<unsigned char> |
Definition at line 117 of file people_detector.h.
◆ Mask
| using pcl::gpu::people::PeopleDetector::Mask = DeviceArray2D<unsigned char> |
Definition at line 118 of file people_detector.h.
◆ PointT
Definition at line 69 of file people_detector.h.
◆ PointTC
Definition at line 68 of file people_detector.h.
◆ Ptr
| using pcl::gpu::people::PeopleDetector::Ptr = shared_ptr<PeopleDetector> |
Definition at line 65 of file people_detector.h.
Constructor & Destructor Documentation
◆ PeopleDetector()
| pcl::gpu::people::PeopleDetector::PeopleDetector | ( | ) |
Class constructor.
Member Function Documentation
◆ allocate_buffers()
| void pcl::gpu::people::PeopleDetector::allocate_buffers | ( | int | rows = 480, |
| int | cols = 640 |
||
| ) |
◆ getClassName()
|
inline |
Class getName method.
Definition at line 115 of file people_detector.h.
◆ getDeltaHueTolerance()
|
inline |
Get the tolerance for the delta on the Hue in Seeded Hue Segmentation step, defaults to 5.
Definition at line 109 of file people_detector.h.
◆ process() [1/3]
| int pcl::gpu::people::PeopleDetector::process | ( | ) |
◆ process() [2/3]
◆ process() [3/3]
| int pcl::gpu::people::PeopleDetector::process | ( | const PointCloud< PointTC >::ConstPtr & | cloud | ) |
Possible will be removed because of extra overheads.
◆ processProb() [1/2]
| int pcl::gpu::people::PeopleDetector::processProb | ( | ) |
Process the depth based on probabilities supporting tracking, person specific files used.
◆ processProb() [2/2]
| int pcl::gpu::people::PeopleDetector::processProb | ( | const PointCloud< PointTC >::ConstPtr & | cloud | ) |
◆ setDeltaHueTolerance()
|
inline |
Set the tolerance for the delta on the Hue in Seeded Hue Segmentation step.
Definition at line 102 of file people_detector.h.
◆ setIntrinsics()
| void pcl::gpu::people::PeopleDetector::setIntrinsics | ( | float | fx, |
| float | fy, | ||
| float | cx = -1, |
||
| float | cy = -1 |
||
| ) |
User must set non standard intrinsics.
◆ shs5()
| void pcl::gpu::people::PeopleDetector::shs5 | ( | const pcl::PointCloud< PointT > & | cloud, |
| const pcl::Indices & | indices, | ||
| unsigned char * | mask | ||
| ) |
Friends And Related Symbol Documentation
◆ PeoplePCDApp
|
friend |
!! only for debug purposes TODO: remove this.
Definition at line 160 of file people_detector.h.
Member Data Documentation
◆ cloud_device_
| DeviceArray2D<PointT> pcl::gpu::people::PeopleDetector::cloud_device_ |
Definition at line 134 of file people_detector.h.
◆ cloud_host_
| PointCloud<PointT> pcl::gpu::people::PeopleDetector::cloud_host_ |
Definition at line 128 of file people_detector.h.
◆ cloud_host_color_
| PointCloud<PointTC> pcl::gpu::people::PeopleDetector::cloud_host_color_ |
Definition at line 129 of file people_detector.h.
◆ cx_
| float pcl::gpu::people::PeopleDetector::cx_ |
Definition at line 123 of file people_detector.h.
◆ cy_
| float pcl::gpu::people::PeopleDetector::cy_ |
Definition at line 123 of file people_detector.h.
◆ delta_hue_tolerance_
| unsigned int pcl::gpu::people::PeopleDetector::delta_hue_tolerance_ |
Definition at line 124 of file people_detector.h.
◆ depth_device1_
| Depth pcl::gpu::people::PeopleDetector::depth_device1_ |
Definition at line 138 of file people_detector.h.
◆ depth_device2_
| Depth pcl::gpu::people::PeopleDetector::depth_device2_ |
Definition at line 139 of file people_detector.h.
◆ depth_host_
| PointCloud<unsigned short> pcl::gpu::people::PeopleDetector::depth_host_ |
Definition at line 131 of file people_detector.h.
◆ face_detector_
| FaceDetector::Ptr pcl::gpu::people::PeopleDetector::face_detector_ |
Definition at line 76 of file people_detector.h.
◆ fg_mask_
| Mask pcl::gpu::people::PeopleDetector::fg_mask_ |
Definition at line 141 of file people_detector.h.
◆ fg_mask_grown_
| Mask pcl::gpu::people::PeopleDetector::fg_mask_grown_ |
Definition at line 142 of file people_detector.h.
◆ first_iteration_
| bool pcl::gpu::people::PeopleDetector::first_iteration_ |
indicates first time callback (allows for tracking features to start from second frame)
Definition at line 122 of file people_detector.h.
◆ flowermat_host_
| PointCloud<unsigned char> pcl::gpu::people::PeopleDetector::flowermat_host_ |
Definition at line 132 of file people_detector.h.
◆ fx_
| float pcl::gpu::people::PeopleDetector::fx_ |
Definition at line 123 of file people_detector.h.
◆ fy_
| float pcl::gpu::people::PeopleDetector::fy_ |
Definition at line 123 of file people_detector.h.
◆ hue_device_
| Hue pcl::gpu::people::PeopleDetector::hue_device_ |
Definition at line 136 of file people_detector.h.
◆ hue_host_
| PointCloud<float> pcl::gpu::people::PeopleDetector::hue_host_ |
Definition at line 130 of file people_detector.h.
◆ kernelRect5x5_
| DeviceArray<unsigned char> pcl::gpu::people::PeopleDetector::kernelRect5x5_ |
Definition at line 126 of file people_detector.h.
◆ org_plane_detector_
| OrganizedPlaneDetector::Ptr pcl::gpu::people::PeopleDetector::org_plane_detector_ |
Definition at line 75 of file people_detector.h.
◆ person_attribs_
| PersonAttribs::Ptr pcl::gpu::people::PeopleDetector::person_attribs_ |
Definition at line 80 of file people_detector.h.
◆ probability_processor_
| ProbabilityProcessor::Ptr pcl::gpu::people::PeopleDetector::probability_processor_ |
Definition at line 81 of file people_detector.h.
◆ rdf_detector_
| RDFBodyPartsDetector::Ptr pcl::gpu::people::PeopleDetector::rdf_detector_ |
Definition at line 74 of file people_detector.h.
The documentation for this class was generated from the following file:
- /__w/1/s/gpu/people/include/pcl/gpu/people/people_detector.h