Based on the paper: Xinju Li and Igor Guskov Multi-scale features for approximate alignment of point-based surfaces Proceedings of the third Eurographics symposium on Geometry processing July 2005, Vienna, Austria.
More...
|
| using | Ptr = shared_ptr< SmoothedSurfacesKeypoint< PointT, PointNT > > |
| |
| using | ConstPtr = shared_ptr< const SmoothedSurfacesKeypoint< PointT, PointNT > > |
| |
| using | PointCloudT = pcl::PointCloud< PointT > |
| |
| using | PointCloudTConstPtr = typename PointCloudT::ConstPtr |
| |
| using | PointCloudNT = pcl::PointCloud< PointNT > |
| |
| using | PointCloudNTConstPtr = typename PointCloudNT::ConstPtr |
| |
| using | PointCloudTPtr = typename PointCloudT::Ptr |
| |
| using | KdTreePtr = typename Keypoint< PointT, PointT >::KdTreePtr |
| |
| using | Ptr = shared_ptr< Keypoint< PointInT, PointOutT > > |
| |
| using | ConstPtr = shared_ptr< const Keypoint< PointInT, PointOutT > > |
| |
| using | BaseClass = PCLBase< PointInT > |
| |
| using | KdTree = pcl::search::Search< PointInT > |
| |
| using | KdTreePtr = typename KdTree::Ptr |
| |
| using | PointCloudIn = pcl::PointCloud< PointInT > |
| |
| using | PointCloudInPtr = typename PointCloudIn::Ptr |
| |
| using | PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
| |
| using | PointCloudOut = pcl::PointCloud< PointOutT > |
| |
| using | SearchMethod = std::function< int(pcl::index_t, double, pcl::Indices &, std::vector< float > &)> |
| |
| using | SearchMethodSurface = std::function< int(const PointCloudIn &cloud, pcl::index_t index, double, pcl::Indices &, std::vector< float > &)> |
| |
| using | PointCloud = pcl::PointCloud< PointInT > |
| |
| using | PointCloudPtr = typename PointCloud::Ptr |
| |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| |
| using | PointIndicesPtr = PointIndices::Ptr |
| |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
| |
|
| | SmoothedSurfacesKeypoint () |
| |
| void | addSmoothedPointCloud (const PointCloudTConstPtr &cloud, const PointCloudNTConstPtr &normals, KdTreePtr &kdtree, float &scale) |
| |
| void | resetClouds () |
| |
| void | setNeighborhoodConstant (float neighborhood_constant) |
| |
| float | getNeighborhoodConstant () |
| |
| void | setInputNormals (const PointCloudNTConstPtr &normals) |
| |
| void | setInputScale (float input_scale) |
| |
| void | detectKeypoints (PointCloudT &output) override |
| |
| | Keypoint ()=default |
| |
| | Keypoint () |
| | Empty constructor.
|
| |
| void | harrisCorner (PointT &output, PointT &input, const float sigma_d, const float sigma_i, const float alpha, const float thresh) |
| |
| void | hessianBlob (PointT &output, PointT &input, const float sigma, bool SCALE) |
| |
| void | hessianBlob (PointT &output, PointT &input, const float start_scale, const float scaling_factor, const int num_scales) |
| |
| void | imageElementMultiply (PointT &output, PointT &input1, PointT &input2) |
| |
| | ~Keypoint () override=default |
| | Empty destructor.
|
| |
| virtual void | setSearchSurface (const PointCloudInConstPtr &cloud) |
| | Provide a pointer to the input dataset that we need to estimate features at every point for.
|
| |
| PointCloudInConstPtr | getSearchSurface () |
| | Get a pointer to the surface point cloud dataset.
|
| |
| void | setSearchMethod (const KdTreePtr &tree) |
| | Provide a pointer to the search object.
|
| |
| KdTreePtr | getSearchMethod () |
| | Get a pointer to the search method used.
|
| |
| double | getSearchParameter () |
| | Get the internal search parameter.
|
| |
| void | setKSearch (int k) |
| | Set the number of k nearest neighbors to use for the feature estimation.
|
| |
| int | getKSearch () |
| | get the number of k nearest neighbors used for the feature estimation.
|
| |
| void | setRadiusSearch (double radius) |
| | Set the sphere radius that is to be used for determining the nearest neighbors used for the key point detection.
|
| |
| double | getRadiusSearch () |
| | Get the sphere radius used for determining the neighbors.
|
| |
| pcl::PointIndicesConstPtr | getKeypointsIndices () |
| |
| void | compute (PointCloudOut &output) |
| | Base method for key point detection for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
|
| |
| int | searchForNeighbors (pcl::index_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| | Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface.
|
| |
| | PCLBase () |
| | Empty constructor.
|
| |
| | PCLBase (const PCLBase &base) |
| | Copy constructor.
|
| |
| virtual | ~PCLBase ()=default |
| | Destructor.
|
| |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| | Provide a pointer to the input dataset.
|
| |
| PointCloudConstPtr const | getInputCloud () const |
| | Get a pointer to the input point cloud dataset.
|
| |
| virtual void | setIndices (const IndicesPtr &indices) |
| | Provide a pointer to the vector of indices that represents the input data.
|
| |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| | Provide a pointer to the vector of indices that represents the input data.
|
| |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| | Provide a pointer to the vector of indices that represents the input data.
|
| |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| | Set the indices for the points laying within an interest region of the point cloud.
|
| |
| IndicesPtr | getIndices () |
| | Get a pointer to the vector of indices used.
|
| |
| IndicesConstPtr const | getIndices () const |
| | Get a pointer to the vector of indices used.
|
| |
| const PointInT & | operator[] (std::size_t pos) const |
| | Override PointCloud operator[] to shorten code.
|
| |
template<typename
PointT, typename PointNT>
class pcl::SmoothedSurfacesKeypoint< PointT, PointNT >
Based on the paper: Xinju Li and Igor Guskov Multi-scale features for approximate alignment of point-based surfaces Proceedings of the third Eurographics symposium on Geometry processing July 2005, Vienna, Austria.
- Author
- Alexandru-Eugen Ichim
Definition at line 54 of file smoothed_surfaces_keypoint.h.
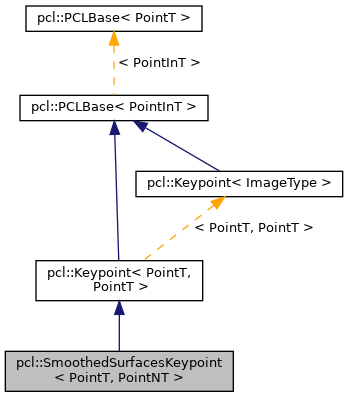
 Inheritance diagram for pcl::SmoothedSurfacesKeypoint< PointT, PointNT >:
Inheritance diagram for pcl::SmoothedSurfacesKeypoint< PointT, PointNT >: