NormalEstimation estimates local surface properties (surface normals and curvatures)at each 3D point. More...
#include <pcl/features/normal_3d.h>
 Inheritance diagram for pcl::NormalEstimation< PointInT, PointOutT >:
Inheritance diagram for pcl::NormalEstimation< PointInT, PointOutT >: Collaboration diagram for pcl::NormalEstimation< PointInT, PointOutT >:
Collaboration diagram for pcl::NormalEstimation< PointInT, PointOutT >: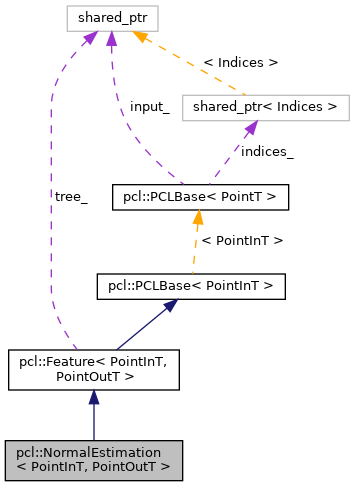
Public Types | |
| using | Ptr = shared_ptr< NormalEstimation< PointInT, PointOutT > > |
| using | ConstPtr = shared_ptr< const NormalEstimation< PointInT, PointOutT > > |
| using | PointCloudOut = typename Feature< PointInT, PointOutT >::PointCloudOut |
| using | PointCloudConstPtr = typename Feature< PointInT, PointOutT >::PointCloudConstPtr |
| Public Types inherited from pcl::Feature< PointInT, PointOutT > | |
| using | BaseClass = PCLBase< PointInT > |
| using | Ptr = shared_ptr< Feature< PointInT, PointOutT > > |
| using | ConstPtr = shared_ptr< const Feature< PointInT, PointOutT > > |
| using | KdTree = pcl::search::Search< PointInT > |
| using | KdTreePtr = typename KdTree::Ptr |
| using | PointCloudIn = pcl::PointCloud< PointInT > |
| using | PointCloudInPtr = typename PointCloudIn::Ptr |
| using | PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
| using | PointCloudOut = pcl::PointCloud< PointOutT > |
| using | SearchMethod = std::function< int(std::size_t, double, pcl::Indices &, std::vector< float > &)> |
| using | SearchMethodSurface = std::function< int(const PointCloudIn &cloud, std::size_t index, double, pcl::Indices &, std::vector< float > &)> |
| Public Types inherited from pcl::PCLBase< PointInT > | |
| using | PointCloud = pcl::PointCloud< PointInT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| NormalEstimation () | |
| Empty constructor. | |
| ~NormalEstimation () override=default | |
| Empty destructor. | |
| bool | computePointNormal (const pcl::PointCloud< PointInT > &cloud, const pcl::Indices &indices, Eigen::Vector4f &plane_parameters, float &curvature) |
| Compute the Least-Squares plane fit for a given set of points, using their indices, and return the estimated plane parameters together with the surface curvature. | |
| bool | computePointNormal (const pcl::PointCloud< PointInT > &cloud, const pcl::Indices &indices, float &nx, float &ny, float &nz, float &curvature) |
| Compute the Least-Squares plane fit for a given set of points, using their indices, and return the estimated plane parameters together with the surface curvature. | |
| void | setInputCloud (const PointCloudConstPtr &cloud) override |
| Provide a pointer to the input dataset. | |
| void | setViewPoint (float vpx, float vpy, float vpz) |
| Set the viewpoint. | |
| void | getViewPoint (float &vpx, float &vpy, float &vpz) |
| Get the viewpoint. | |
| void | useSensorOriginAsViewPoint () |
| sets whether the sensor origin or a user given viewpoint should be used. | |
| Public Member Functions inherited from pcl::Feature< PointInT, PointOutT > | |
| Feature () | |
| Empty constructor. | |
| void | setSearchSurface (const PointCloudInConstPtr &cloud) |
| Provide a pointer to a dataset to add additional information to estimate the features for every point in the input dataset. | |
| PointCloudInConstPtr | getSearchSurface () const |
| Get a pointer to the surface point cloud dataset. | |
| void | setSearchMethod (const KdTreePtr &tree) |
| Provide a pointer to the search object. | |
| KdTreePtr | getSearchMethod () const |
| Get a pointer to the search method used. | |
| double | getSearchParameter () const |
| Get the internal search parameter. | |
| void | setKSearch (int k) |
| Set the number of k nearest neighbors to use for the feature estimation. | |
| int | getKSearch () const |
| get the number of k nearest neighbors used for the feature estimation. | |
| void | setRadiusSearch (double radius) |
| Set the sphere radius that is to be used for determining the nearest neighbors used for the feature estimation. | |
| double | getRadiusSearch () const |
| Get the sphere radius used for determining the neighbors. | |
| void | compute (PointCloudOut &output) |
| Base method for feature estimation for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
| Public Member Functions inherited from pcl::PCLBase< PointInT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointInT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) override |
| Estimate normals for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
| Protected Member Functions inherited from pcl::Feature< PointInT, PointOutT > | |
| const std::string & | getClassName () const |
| Get a string representation of the name of this class. | |
| virtual bool | initCompute () |
| This method should get called before starting the actual computation. | |
| virtual bool | deinitCompute () |
| This method should get called after ending the actual computation. | |
| int | searchForNeighbors (std::size_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface. | |
| int | searchForNeighbors (const PointCloudIn &cloud, std::size_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface. | |
| Protected Member Functions inherited from pcl::PCLBase< PointInT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Protected Attributes | |
| float | vpx_ {0.0f} |
| Values describing the viewpoint ("pinhole" camera model assumed). | |
| float | vpy_ {0.0f} |
| float | vpz_ {0.0f} |
| EIGEN_ALIGN16 Eigen::Matrix3f | covariance_matrix_ |
| Placeholder for the 3x3 covariance matrix at each surface patch. | |
| Eigen::Vector4f | xyz_centroid_ |
| 16-bytes aligned placeholder for the XYZ centroid of a surface patch. | |
| bool | use_sensor_origin_ {true} |
| whether the sensor origin of the input cloud or a user given viewpoint should be used. | |
| Protected Attributes inherited from pcl::Feature< PointInT, PointOutT > | |
| std::string | feature_name_ |
| The feature name. | |
| SearchMethodSurface | search_method_surface_ |
| The search method template for points. | |
| PointCloudInConstPtr | surface_ |
| An input point cloud describing the surface that is to be used for nearest neighbors estimation. | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
| double | search_parameter_ |
| The actual search parameter (from either search_radius_ or k_). | |
| double | search_radius_ |
| The nearest neighbors search radius for each point. | |
| int | k_ |
| The number of K nearest neighbors to use for each point. | |
| bool | fake_surface_ |
| If no surface is given, we use the input PointCloud as the surface. | |
| Protected Attributes inherited from pcl::PCLBase< PointInT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::NormalEstimation< PointInT, PointOutT >
NormalEstimation estimates local surface properties (surface normals and curvatures)at each 3D point.
If PointOutT is specified as pcl::Normal, the normal is stored in the first 3 components (0-2), and the curvature is stored in component 3.
- Note
- The code is stateful as we do not expect this class to be multicore parallelized. Please look at NormalEstimationOMP for a parallel implementation.
Definition at line 243 of file normal_3d.h.
Member Typedef Documentation
◆ ConstPtr
| using pcl::NormalEstimation< PointInT, PointOutT >::ConstPtr = shared_ptr<const NormalEstimation<PointInT, PointOutT> > |
Definition at line 247 of file normal_3d.h.
◆ PointCloudConstPtr
| using pcl::NormalEstimation< PointInT, PointOutT >::PointCloudConstPtr = typename Feature<PointInT, PointOutT>::PointCloudConstPtr |
Definition at line 258 of file normal_3d.h.
◆ PointCloudOut
| using pcl::NormalEstimation< PointInT, PointOutT >::PointCloudOut = typename Feature<PointInT, PointOutT>::PointCloudOut |
Definition at line 257 of file normal_3d.h.
◆ Ptr
| using pcl::NormalEstimation< PointInT, PointOutT >::Ptr = shared_ptr<NormalEstimation<PointInT, PointOutT> > |
Definition at line 246 of file normal_3d.h.
Constructor & Destructor Documentation
◆ NormalEstimation()
|
inline |
Empty constructor.
Definition at line 261 of file normal_3d.h.
References pcl::Feature< PointInT, PointOutT >::feature_name_.
◆ ~NormalEstimation()
|
overridedefault |
Empty destructor.
Member Function Documentation
◆ computeFeature()
|
overrideprotectedvirtual |
Estimate normals for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
- Note
- In situations where not enough neighbors are found, the normal and curvature values are set to NaN.
- Parameters
-
output the resultant point cloud model dataset that contains surface normals and curvatures
Implements pcl::Feature< PointInT, PointOutT >.
Definition at line 48 of file normal_3d.hpp.
References pcl::computePointNormal(), pcl::flipNormalTowardsViewpoint(), and pcl::isFinite().
◆ computePointNormal() [1/2]
|
inline |
Compute the Least-Squares plane fit for a given set of points, using their indices, and return the estimated plane parameters together with the surface curvature.
- Parameters
-
cloud the input point cloud indices the point cloud indices that need to be used plane_parameters the plane parameters as: a, b, c, d (ax + by + cz + d = 0) curvature the estimated surface curvature as a measure of ![\[
\lambda_0 / (\lambda_0 + \lambda_1 + \lambda_2)
\]](form_19.png)
![\[
\lambda_0 / (\lambda_0 + \lambda_1 + \lambda_2)
\]](form_19_dark.png)
Definition at line 280 of file normal_3d.h.
References pcl::computeMeanAndCovarianceMatrix(), pcl::NormalEstimation< PointInT, PointOutT >::covariance_matrix_, pcl::solvePlaneParameters(), and pcl::NormalEstimation< PointInT, PointOutT >::xyz_centroid_.
◆ computePointNormal() [2/2]
|
inline |
Compute the Least-Squares plane fit for a given set of points, using their indices, and return the estimated plane parameters together with the surface curvature.
- Parameters
-
cloud the input point cloud indices the point cloud indices that need to be used nx the resultant X component of the plane normal ny the resultant Y component of the plane normal nz the resultant Z component of the plane normal curvature the estimated surface curvature as a measure of
Definition at line 309 of file normal_3d.h.
References pcl::computeMeanAndCovarianceMatrix(), pcl::NormalEstimation< PointInT, PointOutT >::covariance_matrix_, pcl::solvePlaneParameters(), and pcl::NormalEstimation< PointInT, PointOutT >::xyz_centroid_.
◆ getViewPoint()
|
inline |
Get the viewpoint.
- Parameters
-
[out] vpx x-coordinate of the view point [out] vpy y-coordinate of the view point [out] vpz z-coordinate of the view point
- Note
- this method returns the currently used viewpoint for normal flipping. If the viewpoint is set manually using the setViewPoint method, this method will return the set view point coordinates. If an input cloud is set, it will return the sensor origin otherwise it will return the origin (0, 0, 0)
Definition at line 362 of file normal_3d.h.
References pcl::NormalEstimation< PointInT, PointOutT >::vpx_, pcl::NormalEstimation< PointInT, PointOutT >::vpy_, and pcl::NormalEstimation< PointInT, PointOutT >::vpz_.
◆ setInputCloud()
|
inlineoverridevirtual |
Provide a pointer to the input dataset.
- Parameters
-
cloud the const boost shared pointer to a PointCloud message
Reimplemented from pcl::PCLBase< PointInT >.
Definition at line 328 of file normal_3d.h.
References pcl::PCLBase< PointInT >::input_, pcl::NormalEstimation< PointInT, PointOutT >::use_sensor_origin_, pcl::NormalEstimation< PointInT, PointOutT >::vpx_, pcl::NormalEstimation< PointInT, PointOutT >::vpy_, and pcl::NormalEstimation< PointInT, PointOutT >::vpz_.
Referenced by pcl::UnaryClassifier< PointT >::computeFPFH(), pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >::computeRf(), pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >::detectKeypoints(), pcl::gpu::DataSource::estimateNormals(), pcl::HarrisKeypoint3D< PointInT, PointOutT, NormalT >::initCompute(), pcl::ISSKeypoint3D< PointInT, PointOutT, NormalT >::initCompute(), and pcl::SUSANKeypoint< PointInT, PointOutT, NormalT, IntensityT >::initCompute().
◆ setViewPoint()
|
inline |
Set the viewpoint.
- Parameters
-
vpx the X coordinate of the viewpoint vpy the Y coordinate of the viewpoint vpz the Z coordinate of the viewpoint
Definition at line 345 of file normal_3d.h.
References pcl::NormalEstimation< PointInT, PointOutT >::use_sensor_origin_, pcl::NormalEstimation< PointInT, PointOutT >::vpx_, pcl::NormalEstimation< PointInT, PointOutT >::vpy_, and pcl::NormalEstimation< PointInT, PointOutT >::vpz_.
◆ useSensorOriginAsViewPoint()
|
inline |
sets whether the sensor origin or a user given viewpoint should be used.
After this method, the normal estimation method uses the sensor origin of the input cloud. to use a user defined view point, use the method setViewPoint
Definition at line 374 of file normal_3d.h.
References pcl::PCLBase< PointInT >::input_, pcl::NormalEstimation< PointInT, PointOutT >::use_sensor_origin_, pcl::NormalEstimation< PointInT, PointOutT >::vpx_, pcl::NormalEstimation< PointInT, PointOutT >::vpy_, and pcl::NormalEstimation< PointInT, PointOutT >::vpz_.
Member Data Documentation
◆ covariance_matrix_
|
protected |
Placeholder for the 3x3 covariance matrix at each surface patch.
Definition at line 405 of file normal_3d.h.
Referenced by pcl::NormalEstimation< PointInT, PointOutT >::computePointNormal(), and pcl::NormalEstimation< PointInT, PointOutT >::computePointNormal().
◆ use_sensor_origin_
|
protected |
whether the sensor origin of the input cloud or a user given viewpoint should be used.
Definition at line 411 of file normal_3d.h.
Referenced by pcl::NormalEstimation< PointInT, PointOutT >::setInputCloud(), pcl::NormalEstimation< PointInT, PointOutT >::setViewPoint(), and pcl::NormalEstimation< PointInT, PointOutT >::useSensorOriginAsViewPoint().
◆ vpx_
|
protected |
Values describing the viewpoint ("pinhole" camera model assumed).
For per point viewpoints, inherit from NormalEstimation and provide your own computeFeature (). By default, the viewpoint is set to 0,0,0.
Definition at line 402 of file normal_3d.h.
Referenced by pcl::NormalEstimation< PointInT, PointOutT >::getViewPoint(), pcl::NormalEstimation< PointInT, PointOutT >::setInputCloud(), pcl::NormalEstimation< PointInT, PointOutT >::setViewPoint(), and pcl::NormalEstimation< PointInT, PointOutT >::useSensorOriginAsViewPoint().
◆ vpy_
|
protected |
Definition at line 402 of file normal_3d.h.
Referenced by pcl::NormalEstimation< PointInT, PointOutT >::getViewPoint(), pcl::NormalEstimation< PointInT, PointOutT >::setInputCloud(), pcl::NormalEstimation< PointInT, PointOutT >::setViewPoint(), and pcl::NormalEstimation< PointInT, PointOutT >::useSensorOriginAsViewPoint().
◆ vpz_
|
protected |
Definition at line 402 of file normal_3d.h.
Referenced by pcl::NormalEstimation< PointInT, PointOutT >::getViewPoint(), pcl::NormalEstimation< PointInT, PointOutT >::setInputCloud(), pcl::NormalEstimation< PointInT, PointOutT >::setViewPoint(), and pcl::NormalEstimation< PointInT, PointOutT >::useSensorOriginAsViewPoint().
◆ xyz_centroid_
|
protected |
16-bytes aligned placeholder for the XYZ centroid of a surface patch.
Definition at line 408 of file normal_3d.h.
Referenced by pcl::NormalEstimation< PointInT, PointOutT >::computePointNormal(), and pcl::NormalEstimation< PointInT, PointOutT >::computePointNormal().
The documentation for this class was generated from the following files:
- pcl/features/normal_3d.h
- pcl/features/impl/normal_3d.hpp