Abstract base class for Correspondence Grouping algorithms. More...
#include <pcl/recognition/cg/correspondence_grouping.h>
 Inheritance diagram for pcl::CorrespondenceGrouping< PointModelT, PointSceneT >:
Inheritance diagram for pcl::CorrespondenceGrouping< PointModelT, PointSceneT >: Collaboration diagram for pcl::CorrespondenceGrouping< PointModelT, PointSceneT >:
Collaboration diagram for pcl::CorrespondenceGrouping< PointModelT, PointSceneT >: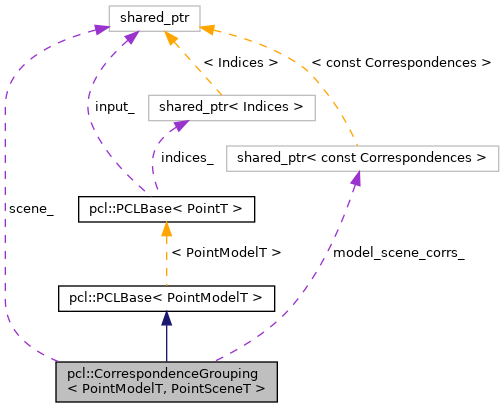
Public Types | |
| using | SceneCloud = pcl::PointCloud< PointSceneT > |
| using | SceneCloudPtr = typename SceneCloud::Ptr |
| using | SceneCloudConstPtr = typename SceneCloud::ConstPtr |
| Public Types inherited from pcl::PCLBase< PointModelT > | |
| using | PointCloud = pcl::PointCloud< PointModelT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| CorrespondenceGrouping () | |
| Empty constructor. | |
| ~CorrespondenceGrouping () override | |
| destructor. | |
| virtual void | setSceneCloud (const SceneCloudConstPtr &scene) |
| Provide a pointer to the scene dataset. | |
| SceneCloudConstPtr | getSceneCloud () const |
| Getter for the scene dataset. | |
| virtual void | setModelSceneCorrespondences (const CorrespondencesConstPtr &corrs) |
| Provide a pointer to the precomputed correspondences between points in the input dataset and points in the scene dataset. | |
| CorrespondencesConstPtr | getModelSceneCorrespondences () const |
| Getter for the precomputed correspondences between points in the input dataset and points in the scene dataset. | |
| std::vector< double > | getCharacteristicScales () const |
| Getter for the vector of characteristic scales associated to each cluster. | |
| void | cluster (std::vector< Correspondences > &clustered_corrs) |
| Clusters the input correspondences belonging to different model instances. | |
| Public Member Functions inherited from pcl::PCLBase< PointModelT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointModelT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| virtual void | clusterCorrespondences (std::vector< Correspondences > &clustered_corrs)=0 |
| The actual clustering method, should be implemented by each subclass. | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
| Protected Member Functions inherited from pcl::PCLBase< PointModelT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Protected Attributes | |
| SceneCloudConstPtr | scene_ |
| The scene cloud. | |
| CorrespondencesConstPtr | model_scene_corrs_ |
| The correspondences between points in the input and the scene datasets. | |
| std::vector< double > | corr_group_scale_ |
| characteristic scale associated to each correspondence subset; if the cg algorithm can not handle scale invariance, the size of the vector will be 0. | |
| Protected Attributes inherited from pcl::PCLBase< PointModelT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::CorrespondenceGrouping< PointModelT, PointSceneT >
Abstract base class for Correspondence Grouping algorithms.
Definition at line 54 of file correspondence_grouping.h.
Member Typedef Documentation
◆ SceneCloud
| using pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::SceneCloud = pcl::PointCloud<PointSceneT> |
Definition at line 57 of file correspondence_grouping.h.
◆ SceneCloudConstPtr
| using pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::SceneCloudConstPtr = typename SceneCloud::ConstPtr |
Definition at line 59 of file correspondence_grouping.h.
◆ SceneCloudPtr
| using pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::SceneCloudPtr = typename SceneCloud::Ptr |
Definition at line 58 of file correspondence_grouping.h.
Constructor & Destructor Documentation
◆ CorrespondenceGrouping()
|
inline |
Empty constructor.
Definition at line 62 of file correspondence_grouping.h.
◆ ~CorrespondenceGrouping()
|
inlineoverride |
destructor.
Definition at line 65 of file correspondence_grouping.h.
References pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::model_scene_corrs_, and pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::scene_.
Member Function Documentation
◆ cluster()
| void pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::cluster | ( | std::vector< Correspondences > & | clustered_corrs | ) |
Clusters the input correspondences belonging to different model instances.
- Parameters
-
[out] clustered_corrs a vector containing the correspondences for each instance of the model found within the input data.
Definition at line 49 of file correspondence_grouping.hpp.
◆ clusterCorrespondences()
|
protectedpure virtual |
The actual clustering method, should be implemented by each subclass.
- Parameters
-
[out] clustered_corrs a vector containing the correspondences for each instance of the model found within the input data.
Implemented in pcl::GeometricConsistencyGrouping< PointModelT, PointSceneT >, and pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >.
◆ deinitCompute()
|
inlineprotected |
This method should get called after finishing the actual computation.
Definition at line 191 of file correspondence_grouping.h.
◆ getCharacteristicScales()
|
inline |
Getter for the vector of characteristic scales associated to each cluster.
- Returns
- the vector of characteristic scales (assuming scale = model / scene)
Definition at line 119 of file correspondence_grouping.h.
References pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::corr_group_scale_.
◆ getModelSceneCorrespondences()
|
inline |
Getter for the precomputed correspondences between points in the input dataset and points in the scene dataset.
- Returns
- the correspondences between the model and the scene.
Definition at line 109 of file correspondence_grouping.h.
References pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::model_scene_corrs_.
◆ getSceneCloud()
|
inline |
Getter for the scene dataset.
- Returns
- the const boost shared pointer to a PointCloud message.
Definition at line 86 of file correspondence_grouping.h.
References pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::scene_.
◆ initCompute()
|
inlineprotected |
This method should get called before starting the actual computation.
Internally, initCompute() does the following:
- checks if an input dataset is given, and returns false otherwise
- checks if a scene dataset is given, and returns false otherwise
- checks if the model-scene correspondences have been given, and returns false otherwise
Definition at line 159 of file correspondence_grouping.h.
References pcl::PCLBase< PointModelT >::input_, pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::model_scene_corrs_, and pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::scene_.
◆ setModelSceneCorrespondences()
|
inlinevirtual |
Provide a pointer to the precomputed correspondences between points in the input dataset and points in the scene dataset.
The correspondences are going to be clustered into different model hypotheses by the algorithm.
- Parameters
-
[in] corrs the correspondences between the model and the scene.
Reimplemented in pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >.
Definition at line 98 of file correspondence_grouping.h.
References pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::model_scene_corrs_.
◆ setSceneCloud()
|
inlinevirtual |
Provide a pointer to the scene dataset.
- Parameters
-
[in] scene the const boost shared pointer to a PointCloud message.
Reimplemented in pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >.
Definition at line 76 of file correspondence_grouping.h.
References pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::scene_.
Member Data Documentation
◆ corr_group_scale_
|
protected |
characteristic scale associated to each correspondence subset; if the cg algorithm can not handle scale invariance, the size of the vector will be 0.
Definition at line 142 of file correspondence_grouping.h.
Referenced by pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::getCharacteristicScales().
◆ model_scene_corrs_
|
protected |
The correspondences between points in the input and the scene datasets.
Definition at line 138 of file correspondence_grouping.h.
Referenced by pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::getModelSceneCorrespondences(), pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::initCompute(), pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::setModelSceneCorrespondences(), pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >::setModelSceneCorrespondences(), and pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::~CorrespondenceGrouping().
◆ scene_
|
protected |
The scene cloud.
Definition at line 133 of file correspondence_grouping.h.
Referenced by pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::getSceneCloud(), pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::initCompute(), pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::setSceneCloud(), pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT >::setSceneCloud(), and pcl::CorrespondenceGrouping< PointModelT, PointSceneT >::~CorrespondenceGrouping().
The documentation for this class was generated from the following files:
- pcl/recognition/cg/correspondence_grouping.h
- pcl/recognition/impl/cg/correspondence_grouping.hpp