TransformationEstimationLM implements Levenberg Marquardt-based estimation of the transformation aligning the given correspondences. More...
#include <pcl/registration/transformation_estimation_lm.h>
 Inheritance diagram for pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >:
Inheritance diagram for pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >: Collaboration diagram for pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >:
Collaboration diagram for pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >: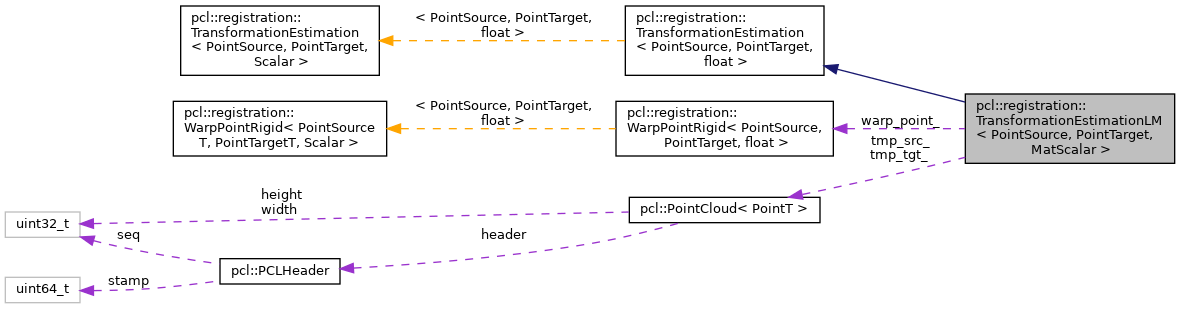
Classes | |
| struct | Functor |
| Base functor all the models that need non linear optimization must define their own one and implement operator() (const Eigen::VectorXd& x, Eigen::VectorXd& fvec) or operator() (const Eigen::VectorXf& x, Eigen::VectorXf& fvec) depending on the chosen _Scalar. More... | |
| struct | OptimizationFunctor |
| struct | OptimizationFunctorWithIndices |
Public Types | |
| using | Ptr = shared_ptr< TransformationEstimationLM< PointSource, PointTarget, MatScalar > > |
| using | ConstPtr = shared_ptr< const TransformationEstimationLM< PointSource, PointTarget, MatScalar > > |
| using | VectorX = Eigen::Matrix< MatScalar, Eigen::Dynamic, 1 > |
| using | Vector4 = Eigen::Matrix< MatScalar, 4, 1 > |
| using | Matrix4 = typename TransformationEstimation< PointSource, PointTarget, MatScalar >::Matrix4 |
| Public Types inherited from pcl::registration::TransformationEstimation< PointSource, PointTarget, Scalar > | |
| using | Matrix4 = Eigen::Matrix< Scalar, 4, 4 > |
| using | Ptr = shared_ptr< TransformationEstimation< PointSource, PointTarget, Scalar > > |
| using | ConstPtr = shared_ptr< const TransformationEstimation< PointSource, PointTarget, Scalar > > |
Public Member Functions | |
| TransformationEstimationLM () | |
| Constructor. | |
| TransformationEstimationLM (const TransformationEstimationLM &src) | |
| Copy constructor. | |
| TransformationEstimationLM & | operator= (const TransformationEstimationLM &src) |
| Copy operator. | |
| ~TransformationEstimationLM () override=default | |
| Destructor. | |
| void | estimateRigidTransformation (const pcl::PointCloud< PointSource > &cloud_src, const pcl::PointCloud< PointTarget > &cloud_tgt, Matrix4 &transformation_matrix) const override |
| Estimate a rigid rotation transformation between a source and a target point cloud using LM. | |
| void | estimateRigidTransformation (const pcl::PointCloud< PointSource > &cloud_src, const pcl::Indices &indices_src, const pcl::PointCloud< PointTarget > &cloud_tgt, Matrix4 &transformation_matrix) const override |
| Estimate a rigid rotation transformation between a source and a target point cloud using LM. | |
| void | estimateRigidTransformation (const pcl::PointCloud< PointSource > &cloud_src, const pcl::Indices &indices_src, const pcl::PointCloud< PointTarget > &cloud_tgt, const pcl::Indices &indices_tgt, Matrix4 &transformation_matrix) const override |
| Estimate a rigid rotation transformation between a source and a target point cloud using LM. | |
| void | estimateRigidTransformation (const pcl::PointCloud< PointSource > &cloud_src, const pcl::PointCloud< PointTarget > &cloud_tgt, const pcl::Correspondences &correspondences, Matrix4 &transformation_matrix) const override |
| Estimate a rigid rotation transformation between a source and a target point cloud using LM. | |
| void | setWarpFunction (const typename WarpPointRigid< PointSource, PointTarget, MatScalar >::Ptr &warp_fcn) |
| Set the function we use to warp points. | |
| Public Member Functions inherited from pcl::registration::TransformationEstimation< PointSource, PointTarget, Scalar > | |
| TransformationEstimation ()=default | |
| virtual | ~TransformationEstimation ()=default |
| virtual void | estimateRigidTransformation (const pcl::PointCloud< PointSource > &cloud_src, const pcl::PointCloud< PointTarget > &cloud_tgt, Matrix4 &transformation_matrix) const =0 |
| Estimate a rigid rotation transformation between a source and a target point cloud. | |
| virtual void | estimateRigidTransformation (const pcl::PointCloud< PointSource > &cloud_src, const pcl::Indices &indices_src, const pcl::PointCloud< PointTarget > &cloud_tgt, Matrix4 &transformation_matrix) const =0 |
| Estimate a rigid rotation transformation between a source and a target point cloud. | |
| virtual void | estimateRigidTransformation (const pcl::PointCloud< PointSource > &cloud_src, const pcl::Indices &indices_src, const pcl::PointCloud< PointTarget > &cloud_tgt, const pcl::Indices &indices_tgt, Matrix4 &transformation_matrix) const =0 |
| Estimate a rigid rotation transformation between a source and a target point cloud. | |
| virtual void | estimateRigidTransformation (const pcl::PointCloud< PointSource > &cloud_src, const pcl::PointCloud< PointTarget > &cloud_tgt, const pcl::Correspondences &correspondences, Matrix4 &transformation_matrix) const =0 |
| Estimate a rigid rotation transformation between a source and a target point cloud. | |
Protected Member Functions | |
| virtual MatScalar | computeDistance (const PointSource &p_src, const PointTarget &p_tgt) const |
| Compute the distance between a source point and its corresponding target point. | |
| virtual MatScalar | computeDistance (const Vector4 &p_src, const PointTarget &p_tgt) const |
| Compute the distance between a source point and its corresponding target point. | |
Protected Attributes | |
| const PointCloudSource * | tmp_src_ {nullptr} |
| Temporary pointer to the source dataset. | |
| const PointCloudTarget * | tmp_tgt_ {nullptr} |
| Temporary pointer to the target dataset. | |
| const pcl::Indices * | tmp_idx_src_ {nullptr} |
| Temporary pointer to the source dataset indices. | |
| const pcl::Indices * | tmp_idx_tgt_ {nullptr} |
| Temporary pointer to the target dataset indices. | |
| pcl::registration::WarpPointRigid< PointSource, PointTarget, MatScalar >::Ptr | warp_point_ |
| The parameterized function used to warp the source to the target. | |
Detailed Description
class pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >
TransformationEstimationLM implements Levenberg Marquardt-based estimation of the transformation aligning the given correspondences.
- Note
- The class is templated on the source and target point types as well as on the output scalar of the transformation matrix (i.e., float or double). Default: float.
Definition at line 58 of file transformation_estimation_lm.h.
Member Typedef Documentation
◆ ConstPtr
| using pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::ConstPtr = shared_ptr<const TransformationEstimationLM<PointSource, PointTarget, MatScalar> > |
Definition at line 72 of file transformation_estimation_lm.h.
◆ Matrix4
| using pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::Matrix4 = typename TransformationEstimation<PointSource, PointTarget, MatScalar>::Matrix4 |
Definition at line 77 of file transformation_estimation_lm.h.
◆ Ptr
| using pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::Ptr = shared_ptr<TransformationEstimationLM<PointSource, PointTarget, MatScalar> > |
Definition at line 70 of file transformation_estimation_lm.h.
◆ Vector4
| using pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::Vector4 = Eigen::Matrix<MatScalar, 4, 1> |
Definition at line 76 of file transformation_estimation_lm.h.
◆ VectorX
| using pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::VectorX = Eigen::Matrix<MatScalar, Eigen::Dynamic, 1> |
Definition at line 75 of file transformation_estimation_lm.h.
Constructor & Destructor Documentation
◆ TransformationEstimationLM() [1/2]
| pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::TransformationEstimationLM | ( | ) |
Constructor.
Definition at line 49 of file transformation_estimation_lm.hpp.
◆ TransformationEstimationLM() [2/2]
|
inline |
Copy constructor.
- Parameters
-
[in] src the TransformationEstimationLM object to copy into this
Definition at line 86 of file transformation_estimation_lm.h.
◆ ~TransformationEstimationLM()
|
overridedefault |
Destructor.
Member Function Documentation
◆ computeDistance() [1/2]
|
inlineprotectedvirtual |
Compute the distance between a source point and its corresponding target point.
- Parameters
-
[in] p_src The source point [in] p_tgt The target point
- Returns
- The distance between p_src and p_tgt
- Note
- Older versions of PCL used this method internally for calculating the optimization gradient. Since PCL 1.7, a switch has been made to the computeDistance method using Vector4 types instead. This method is only kept for API compatibility reasons.
Reimplemented in pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget, Scalar >, pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget, float >, and pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget, MatScalar >.
Definition at line 184 of file transformation_estimation_lm.h.
◆ computeDistance() [2/2]
|
inlineprotectedvirtual |
Compute the distance between a source point and its corresponding target point.
- Parameters
-
[in] p_src The source point [in] p_tgt The target point
- Returns
- The distance between p_src and p_tgt
- Note
- A different distance function can be defined by creating a subclass of TransformationEstimationLM and overriding this method. (See TransformationEstimationPointToPlane)
Reimplemented in pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget, MatScalar >.
Definition at line 200 of file transformation_estimation_lm.h.
◆ estimateRigidTransformation() [1/4]
|
inlineoverride |
Estimate a rigid rotation transformation between a source and a target point cloud using LM.
- Parameters
-
[in] cloud_src the source point cloud dataset [in] indices_src the vector of indices describing the points of interest in cloud_src [in] cloud_tgt the target point cloud dataset [in] indices_tgt the vector of indices describing the correspondences of the interest points from indices_src [out] transformation_matrix the resultant transformation matrix
Definition at line 152 of file transformation_estimation_lm.hpp.
◆ estimateRigidTransformation() [2/4]
|
inlineoverride |
Estimate a rigid rotation transformation between a source and a target point cloud using LM.
- Parameters
-
[in] cloud_src the source point cloud dataset [in] indices_src the vector of indices describing the points of interest in cloud_src [in] cloud_tgt the target point cloud dataset [out] transformation_matrix the resultant transformation matrix
Definition at line 121 of file transformation_estimation_lm.hpp.
References pcl::PointCloud< PointT >::size().
◆ estimateRigidTransformation() [3/4]
|
inlineoverride |
Estimate a rigid rotation transformation between a source and a target point cloud using LM.
- Parameters
-
[in] cloud_src the source point cloud dataset [in] cloud_tgt the target point cloud dataset [in] correspondences the vector of correspondences between source and target point cloud [out] transformation_matrix the resultant transformation matrix
Definition at line 219 of file transformation_estimation_lm.hpp.
◆ estimateRigidTransformation() [4/4]
|
inlineoverride |
Estimate a rigid rotation transformation between a source and a target point cloud using LM.
- Parameters
-
[in] cloud_src the source point cloud dataset [in] cloud_tgt the target point cloud dataset [out] transformation_matrix the resultant transformation matrix
Definition at line 58 of file transformation_estimation_lm.hpp.
References pcl::PointCloud< PointT >::size().
◆ operator=()
|
inline |
Copy operator.
- Parameters
-
[in] src the TransformationEstimationLM object to copy into this
Definition at line 97 of file transformation_estimation_lm.h.
References pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::tmp_idx_src_, pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::tmp_idx_tgt_, pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::tmp_src_, pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::tmp_tgt_, and pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::warp_point_.
◆ setWarpFunction()
|
inline |
Set the function we use to warp points.
Defaults to rigid 6D warp.
- Parameters
-
[in] warp_fcn a shared pointer to an object that warps points
Definition at line 167 of file transformation_estimation_lm.h.
References pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::warp_point_.
Member Data Documentation
◆ tmp_idx_src_
|
mutableprotected |
Temporary pointer to the source dataset indices.
Definition at line 213 of file transformation_estimation_lm.h.
Referenced by pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::operator=().
◆ tmp_idx_tgt_
|
mutableprotected |
Temporary pointer to the target dataset indices.
Definition at line 216 of file transformation_estimation_lm.h.
Referenced by pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::operator=().
◆ tmp_src_
|
mutableprotected |
Temporary pointer to the source dataset.
Definition at line 207 of file transformation_estimation_lm.h.
Referenced by pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::operator=().
◆ tmp_tgt_
|
mutableprotected |
Temporary pointer to the target dataset.
Definition at line 210 of file transformation_estimation_lm.h.
Referenced by pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::operator=().
◆ warp_point_
|
protected |
The parameterized function used to warp the source to the target.
Definition at line 220 of file transformation_estimation_lm.h.
Referenced by pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::operator=(), and pcl::registration::TransformationEstimationLM< PointSource, PointTarget, MatScalar >::setWarpFunction().
The documentation for this class was generated from the following files:
- pcl/registration/transformation_estimation_lm.h
- pcl/registration/impl/transformation_estimation_lm.hpp