|
| | VoxelGridLabel ()=default |
| | Constructor.
|
| |
| PCL_MAKE_ALIGNED_OPERATOR_NEW | VoxelGrid () |
| | Empty constructor.
|
| |
| | ~VoxelGrid () override=default |
| | Destructor.
|
| |
| void | setLeafSize (const Eigen::Vector4f &leaf_size) |
| | Set the voxel grid leaf size.
|
| |
| void | setLeafSize (float lx, float ly, float lz) |
| | Set the voxel grid leaf size.
|
| |
| Eigen::Vector3f | getLeafSize () const |
| | Get the voxel grid leaf size.
|
| |
| void | setDownsampleAllData (bool downsample) |
| | Set to true if all fields need to be downsampled, or false if just XYZ.
|
| |
| bool | getDownsampleAllData () const |
| | Get the state of the internal downsampling parameter (true if all fields need to be downsampled, false if just XYZ).
|
| |
| void | setMinimumPointsNumberPerVoxel (unsigned int min_points_per_voxel) |
| | Set the minimum number of points required for a voxel to be used.
|
| |
| unsigned int | getMinimumPointsNumberPerVoxel () const |
| | Return the minimum number of points required for a voxel to be used.
|
| |
| void | setSaveLeafLayout (bool save_leaf_layout) |
| | Set to true if leaf layout information needs to be saved for later access.
|
| |
| bool | getSaveLeafLayout () const |
| | Returns true if leaf layout information will to be saved for later access.
|
| |
| Eigen::Vector3i | getMinBoxCoordinates () const |
| | Get the minimum coordinates of the bounding box (after filtering is performed).
|
| |
| Eigen::Vector3i | getMaxBoxCoordinates () const |
| | Get the maximum coordinates of the bounding box (after filtering is performed).
|
| |
| Eigen::Vector3i | getNrDivisions () const |
| | Get the number of divisions along all 3 axes (after filtering is performed).
|
| |
| Eigen::Vector3i | getDivisionMultiplier () const |
| | Get the multipliers to be applied to the grid coordinates in order to find the centroid index (after filtering is performed).
|
| |
| int | getCentroidIndex (const pcl::PointXYZRGBL &p) const |
| | Returns the index in the resulting downsampled cloud of the specified point.
|
| |
| std::vector< int > | getNeighborCentroidIndices (const pcl::PointXYZRGBL &reference_point, const Eigen::MatrixXi &relative_coordinates) const |
| | Returns the indices in the resulting downsampled cloud of the points at the specified grid coordinates, relative to the grid coordinates of the specified point (or -1 if the cell was empty/out of bounds).
|
| |
| std::vector< int > | getLeafLayout () const |
| | Returns the layout of the leafs for fast access to cells relative to current position.
|
| |
| Eigen::Vector3i | getGridCoordinates (float x, float y, float z) const |
| | Returns the corresponding (i,j,k) coordinates in the grid of point (x,y,z).
|
| |
| int | getCentroidIndexAt (const Eigen::Vector3i &ijk) const |
| | Returns the index in the downsampled cloud corresponding to a given set of coordinates.
|
| |
| void | setFilterFieldName (const std::string &field_name) |
| | Provide the name of the field to be used for filtering data.
|
| |
| std::string const | getFilterFieldName () const |
| | Get the name of the field used for filtering.
|
| |
| void | setFilterLimits (const double &limit_min, const double &limit_max) |
| | Set the field filter limits.
|
| |
| void | getFilterLimits (double &limit_min, double &limit_max) const |
| | Get the field filter limits (min/max) set by the user.
|
| |
| void | setFilterLimitsNegative (const bool limit_negative) |
| | Set to true if we want to return the data outside the interval specified by setFilterLimits (min, max).
|
| |
| void | getFilterLimitsNegative (bool &limit_negative) const |
| | Get whether the data outside the interval (min/max) is to be returned (true) or inside (false).
|
| |
| bool | getFilterLimitsNegative () const |
| | Get whether the data outside the interval (min/max) is to be returned (true) or inside (false).
|
| |
| | Filter (bool extract_removed_indices=false) |
| | Empty constructor.
|
| |
| IndicesConstPtr const | getRemovedIndices () const |
| | Get the point indices being removed.
|
| |
| void | getRemovedIndices (PointIndices &pi) |
| | Get the point indices being removed.
|
| |
| void | filter (PointCloud &output) |
| | Calls the filtering method and returns the filtered dataset in output.
|
| |
| | PCLBase () |
| | Empty constructor.
|
| |
| | PCLBase (const PCLBase &base) |
| | Copy constructor.
|
| |
| virtual | ~PCLBase ()=default |
| | Destructor.
|
| |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| | Provide a pointer to the input dataset.
|
| |
| PointCloudConstPtr const | getInputCloud () const |
| | Get a pointer to the input point cloud dataset.
|
| |
| virtual void | setIndices (const IndicesPtr &indices) |
| | Provide a pointer to the vector of indices that represents the input data.
|
| |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| | Provide a pointer to the vector of indices that represents the input data.
|
| |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| | Provide a pointer to the vector of indices that represents the input data.
|
| |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| | Set the indices for the points laying within an interest region of the point cloud.
|
| |
| IndicesPtr | getIndices () |
| | Get a pointer to the vector of indices used.
|
| |
| IndicesConstPtr const | getIndices () const |
| | Get a pointer to the vector of indices used.
|
| |
| const PointT & | operator[] (std::size_t pos) const |
| | Override PointCloud operator[] to shorten code.
|
| |
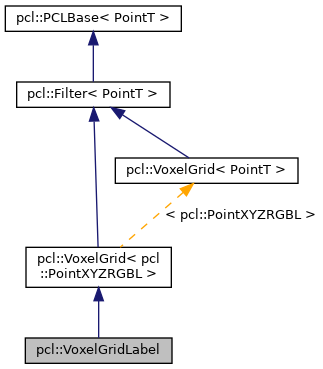
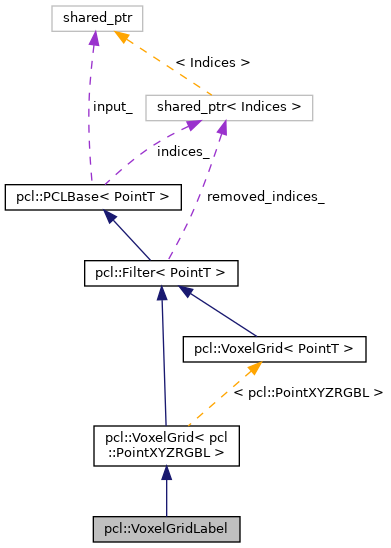
 Inheritance diagram for pcl::VoxelGridLabel:
Inheritance diagram for pcl::VoxelGridLabel: