|
| using | Ptr = shared_ptr< GFPFHEstimation< PointInT, PointLT, PointOutT > > |
| |
| using | ConstPtr = shared_ptr< const GFPFHEstimation< PointInT, PointLT, PointOutT > > |
| |
| using | PointCloudOut = typename Feature< PointInT, PointOutT >::PointCloudOut |
| |
| using | PointCloudIn = typename Feature< PointInT, PointOutT >::PointCloudIn |
| |
| using | Ptr = shared_ptr< FeatureFromLabels< PointInT, PointLT, PointOutT > > |
| |
| using | ConstPtr = shared_ptr< const FeatureFromLabels< PointInT, PointLT, PointOutT > > |
| |
| using | BaseClass = PCLBase< PointInT > |
| |
| using | Ptr = shared_ptr< Feature< PointInT, PointOutT > > |
| |
| using | ConstPtr = shared_ptr< const Feature< PointInT, PointOutT > > |
| |
| using | KdTree = pcl::search::Search< PointInT > |
| |
| using | KdTreePtr = typename KdTree::Ptr |
| |
| using | PointCloudIn = pcl::PointCloud< PointInT > |
| |
| using | PointCloudInPtr = typename PointCloudIn::Ptr |
| |
| using | PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
| |
| using | PointCloudOut = pcl::PointCloud< PointOutT > |
| |
| using | SearchMethod = std::function< int(std::size_t, double, pcl::Indices &, std::vector< float > &)> |
| |
| using | SearchMethodSurface = std::function< int(const PointCloudIn &cloud, std::size_t index, double, pcl::Indices &, std::vector< float > &)> |
| |
| using | PointCloud = pcl::PointCloud< PointInT > |
| |
| using | PointCloudPtr = typename PointCloud::Ptr |
| |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| |
| using | PointIndicesPtr = PointIndices::Ptr |
| |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
| |
|
| | GFPFHEstimation () |
| | Empty constructor.
|
| |
| void | setOctreeLeafSize (double size) |
| | Set the size of the octree leaves.
|
| |
| double | getOctreeLeafSize () |
| | Get the sphere radius used for determining the neighbors.
|
| |
| std::uint32_t | emptyLabel () const |
| | Return the empty label value.
|
| |
| std::uint32_t | getNumberOfClasses () const |
| | Return the number of different classes.
|
| |
| void | setNumberOfClasses (std::uint32_t n) |
| | Set the number of different classes.
|
| |
| int | descriptorSize () const |
| | Return the size of the descriptor.
|
| |
| void | compute (PointCloudOut &output) |
| | Overloaded computed method from pcl::Feature.
|
| |
| | FeatureFromLabels () |
| | Empty constructor.
|
| |
| void | setInputLabels (const PointCloudLConstPtr &labels) |
| | Provide a pointer to the input dataset that contains the point labels of the XYZ dataset.
|
| |
| PointCloudLConstPtr | getInputLabels () const |
| | Get a pointer to the labels of the input XYZ point cloud dataset.
|
| |
| | Feature () |
| | Empty constructor.
|
| |
| void | setSearchSurface (const PointCloudInConstPtr &cloud) |
| | Provide a pointer to a dataset to add additional information to estimate the features for every point in the input dataset.
|
| |
| PointCloudInConstPtr | getSearchSurface () const |
| | Get a pointer to the surface point cloud dataset.
|
| |
| void | setSearchMethod (const KdTreePtr &tree) |
| | Provide a pointer to the search object.
|
| |
| KdTreePtr | getSearchMethod () const |
| | Get a pointer to the search method used.
|
| |
| double | getSearchParameter () const |
| | Get the internal search parameter.
|
| |
| void | setKSearch (int k) |
| | Set the number of k nearest neighbors to use for the feature estimation.
|
| |
| int | getKSearch () const |
| | get the number of k nearest neighbors used for the feature estimation.
|
| |
| void | setRadiusSearch (double radius) |
| | Set the sphere radius that is to be used for determining the nearest neighbors used for the feature estimation.
|
| |
| double | getRadiusSearch () const |
| | Get the sphere radius used for determining the neighbors.
|
| |
| void | compute (PointCloudOut &output) |
| | Base method for feature estimation for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
|
| |
| | PCLBase () |
| | Empty constructor.
|
| |
| | PCLBase (const PCLBase &base) |
| | Copy constructor.
|
| |
| virtual | ~PCLBase ()=default |
| | Destructor.
|
| |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| | Provide a pointer to the input dataset.
|
| |
| PointCloudConstPtr const | getInputCloud () const |
| | Get a pointer to the input point cloud dataset.
|
| |
| virtual void | setIndices (const IndicesPtr &indices) |
| | Provide a pointer to the vector of indices that represents the input data.
|
| |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| | Provide a pointer to the vector of indices that represents the input data.
|
| |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| | Provide a pointer to the vector of indices that represents the input data.
|
| |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| | Set the indices for the points laying within an interest region of the point cloud.
|
| |
| IndicesPtr | getIndices () |
| | Get a pointer to the vector of indices used.
|
| |
| IndicesConstPtr const | getIndices () const |
| | Get a pointer to the vector of indices used.
|
| |
| const PointInT & | operator[] (std::size_t pos) const |
| | Override PointCloud operator[] to shorten code.
|
| |
|
| void | computeFeature (PointCloudOut &output) override |
| | Estimate the Point Feature Histograms (PFH) descriptors at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
|
| |
| std::uint32_t | getDominantLabel (const pcl::Indices &indices) |
| | Return the dominant label of a set of points.
|
| |
| void | computeTransitionHistograms (const std::vector< std::vector< int > > &label_histograms, std::vector< std::vector< int > > &transition_histograms) |
| | Compute the fixed-length histograms of transitions.
|
| |
| void | computeDistancesToMean (const std::vector< std::vector< int > > &transition_histograms, std::vector< float > &distances) |
| | Compute the distance of each transition histogram to the mean.
|
| |
| float | computeHIKDistance (const std::vector< int > &histogram, const std::vector< float > &mean_histogram) |
| | Return the Intersection Kernel distance between two histograms.
|
| |
| void | computeDistanceHistogram (const std::vector< float > &distances, std::vector< float > &histogram) |
| | Compute the binned histogram of distance values.
|
| |
| void | computeMeanHistogram (const std::vector< std::vector< int > > &histograms, std::vector< float > &mean_histogram) |
| | Compute the mean histogram of the given set of histograms.
|
| |
| virtual bool | initCompute () |
| | This method should get called before starting the actual computation.
|
| |
| const std::string & | getClassName () const |
| | Get a string representation of the name of this class.
|
| |
| virtual bool | deinitCompute () |
| | This method should get called after ending the actual computation.
|
| |
| int | searchForNeighbors (std::size_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| | Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface.
|
| |
| int | searchForNeighbors (const PointCloudIn &cloud, std::size_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| | Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface.
|
| |
| bool | initCompute () |
| | This method should get called before starting the actual computation.
|
| |
| bool | deinitCompute () |
| | This method should get called after finishing the actual computation.
|
| |
template<typename PointInT, typename PointLT, typename PointOutT>
class pcl::GFPFHEstimation< PointInT, PointLT, PointOutT >
GFPFHEstimation estimates the Global Fast Point Feature Histogram (GFPFH) descriptor for a given point cloud dataset containing points and labels.
- Note
- If you use this code in any academic work, please cite:
-
R.B. Rusu, A. Holzbach, M. Beetz. Detecting and Segmenting Objects for Mobile Manipulation. In the S3DV Workshop of the 12th International Conference on Computer Vision (ICCV), 2009.
- Author
- Radu B. Rusu
- Template Parameters
-
Definition at line 65 of file gfpfh.h.
template<typename PointInT , typename PointNT , typename PointOutT >
Estimate the Point Feature Histograms (PFH) descriptors at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
- Parameters
-
| output | the resultant point cloud model dataset that contains the PFH feature estimates |
Implements pcl::Feature< PointInT, PointOutT >.
Definition at line 80 of file gfpfh.hpp.
References pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT, OctreeT >::addPointsFromInputCloud(), pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT, OctreeT >::getApproxIntersectedVoxelCentersBySegment(), pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT, OctreeT >::getOccupiedVoxelCenters(), pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT, OctreeT >::setInputCloud(), pcl::PointCloud< PointT >::size(), and pcl::octree::OctreePointCloudSearch< PointT, LeafContainerT, BranchContainerT >::voxelSearch().
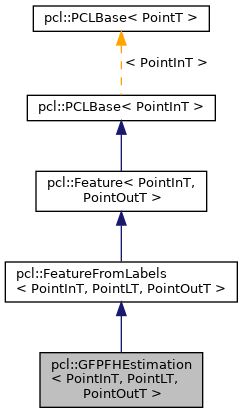
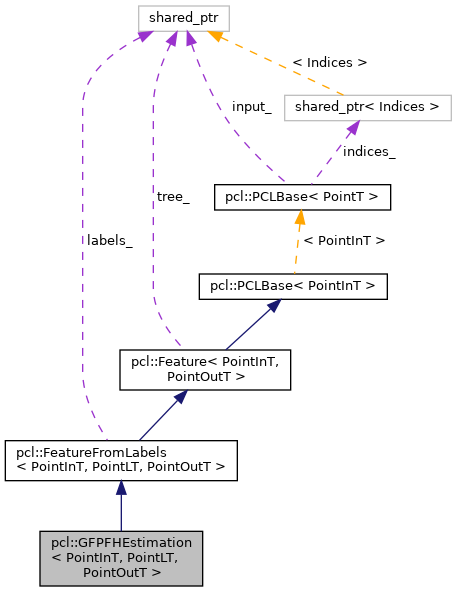
 Inheritance diagram for pcl::GFPFHEstimation< PointInT, PointLT, PointOutT >:
Inheritance diagram for pcl::GFPFHEstimation< PointInT, PointLT, PointOutT >: