GASDEstimation estimates the Globally Aligned Spatial Distribution (GASD) descriptor for a given point cloud dataset given XYZ data. More...
#include <pcl/features/gasd.h>
 Inheritance diagram for pcl::GASDEstimation< PointInT, PointOutT >:
Inheritance diagram for pcl::GASDEstimation< PointInT, PointOutT >: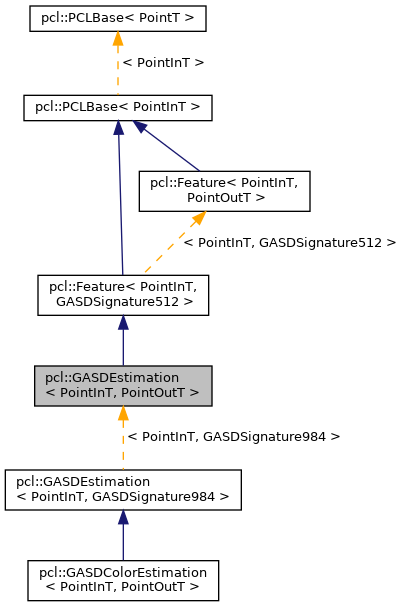 Collaboration diagram for pcl::GASDEstimation< PointInT, PointOutT >:
Collaboration diagram for pcl::GASDEstimation< PointInT, PointOutT >: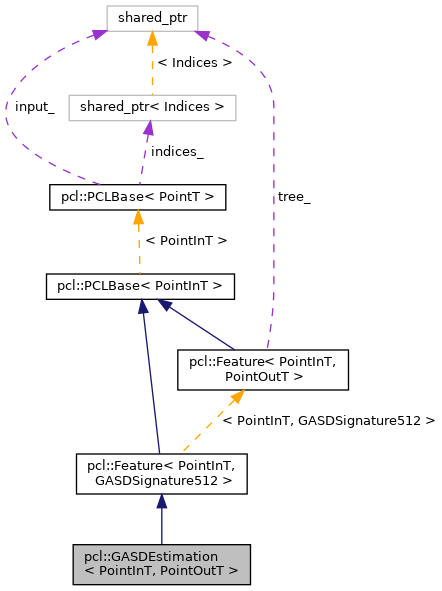
Public Types | |
| using | Ptr = shared_ptr< GASDEstimation< PointInT, PointOutT > > |
| using | ConstPtr = shared_ptr< const GASDEstimation< PointInT, PointOutT > > |
| Public Types inherited from pcl::Feature< PointInT, PointOutT > | |
| using | BaseClass = PCLBase< PointInT > |
| using | Ptr = shared_ptr< Feature< PointInT, PointOutT > > |
| using | ConstPtr = shared_ptr< const Feature< PointInT, PointOutT > > |
| using | KdTree = pcl::search::Search< PointInT > |
| using | KdTreePtr = typename KdTree::Ptr |
| using | PointCloudIn = pcl::PointCloud< PointInT > |
| using | PointCloudInPtr = typename PointCloudIn::Ptr |
| using | PointCloudInConstPtr = typename PointCloudIn::ConstPtr |
| using | PointCloudOut = pcl::PointCloud< PointOutT > |
| using | SearchMethod = std::function< int(std::size_t, double, pcl::Indices &, std::vector< float > &)> |
| using | SearchMethodSurface = std::function< int(const PointCloudIn &cloud, std::size_t index, double, pcl::Indices &, std::vector< float > &)> |
| Public Types inherited from pcl::PCLBase< PointInT > | |
| using | PointCloud = pcl::PointCloud< PointInT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| GASDEstimation (const Eigen::Vector3f &view_direction=Eigen::Vector3f(0.0f, 0.0f, 1.0f), const std::size_t shape_half_grid_size=4, const std::size_t shape_hists_size=1, const HistogramInterpolationMethod shape_interp=INTERP_TRILINEAR) | |
| Constructor. | |
| void | setViewDirection (const Eigen::Vector3f &dir) |
| Set the view direction. | |
| void | setShapeHalfGridSize (const std::size_t shgs) |
| Set the shape half grid size. | |
| void | setShapeHistsSize (const std::size_t shs) |
| Set the shape histograms size. | |
| void | setShapeHistsInterpMethod (const HistogramInterpolationMethod interp) |
| Set the shape histograms interpolation method. | |
| const Eigen::Matrix4f & | getTransform () const |
| Returns the transformation aligning the point cloud to the canonical coordinate system. | |
| void | compute (PointCloudOut &output) |
| Overloaded computed method from pcl::Feature. | |
| Public Member Functions inherited from pcl::Feature< PointInT, PointOutT > | |
| Feature () | |
| Empty constructor. | |
| void | setSearchSurface (const PointCloudInConstPtr &cloud) |
| Provide a pointer to a dataset to add additional information to estimate the features for every point in the input dataset. | |
| PointCloudInConstPtr | getSearchSurface () const |
| Get a pointer to the surface point cloud dataset. | |
| void | setSearchMethod (const KdTreePtr &tree) |
| Provide a pointer to the search object. | |
| KdTreePtr | getSearchMethod () const |
| Get a pointer to the search method used. | |
| double | getSearchParameter () const |
| Get the internal search parameter. | |
| void | setKSearch (int k) |
| Set the number of k nearest neighbors to use for the feature estimation. | |
| int | getKSearch () const |
| get the number of k nearest neighbors used for the feature estimation. | |
| void | setRadiusSearch (double radius) |
| Set the sphere radius that is to be used for determining the nearest neighbors used for the feature estimation. | |
| double | getRadiusSearch () const |
| Get the sphere radius used for determining the neighbors. | |
| void | compute (PointCloudOut &output) |
| Base method for feature estimation for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
| Public Member Functions inherited from pcl::PCLBase< PointInT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointInT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Member Functions | |
| void | addSampleToHistograms (const Eigen::Vector4f &p, const float max_coord, const std::size_t half_grid_size, const HistogramInterpolationMethod interp, const float hbin, const float hist_incr, std::vector< Eigen::VectorXf > &hists) |
| add a sample to its respective histogram, optionally performing interpolation. | |
| void | computeFeature (PointCloudOut &output) override |
| Estimate GASD descriptor. | |
| Protected Member Functions inherited from pcl::Feature< PointInT, PointOutT > | |
| const std::string & | getClassName () const |
| Get a string representation of the name of this class. | |
| virtual bool | initCompute () |
| This method should get called before starting the actual computation. | |
| virtual bool | deinitCompute () |
| This method should get called after ending the actual computation. | |
| int | searchForNeighbors (std::size_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface. | |
| int | searchForNeighbors (const PointCloudIn &cloud, std::size_t index, double parameter, pcl::Indices &indices, std::vector< float > &distances) const |
| Search for k-nearest neighbors using the spatial locator from setSearchmethod, and the given surface from setSearchSurface. | |
| Protected Member Functions inherited from pcl::PCLBase< PointInT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Protected Attributes | |
| PointCloudIn | shape_samples_ |
| Point cloud aligned to the canonical coordinate system. | |
| float | max_coord_ |
| Normalization factor with respect to axis-aligned bounding cube centered on the origin. | |
| float | hist_incr_ |
| Normalized sample contribution with respect to the total number of points in the cloud. | |
| std::size_t | pos_ |
| Current position of output descriptor point cloud. | |
| Protected Attributes inherited from pcl::Feature< PointInT, PointOutT > | |
| std::string | feature_name_ |
| The feature name. | |
| SearchMethodSurface | search_method_surface_ |
| The search method template for points. | |
| PointCloudInConstPtr | surface_ |
| An input point cloud describing the surface that is to be used for nearest neighbors estimation. | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
| double | search_parameter_ |
| The actual search parameter (from either search_radius_ or k_). | |
| double | search_radius_ |
| The nearest neighbors search radius for each point. | |
| int | k_ |
| The number of K nearest neighbors to use for each point. | |
| bool | fake_surface_ |
| If no surface is given, we use the input PointCloud as the surface. | |
| Protected Attributes inherited from pcl::PCLBase< PointInT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::GASDEstimation< PointInT, PointOutT >
GASDEstimation estimates the Globally Aligned Spatial Distribution (GASD) descriptor for a given point cloud dataset given XYZ data.
The suggested PointOutT is pcl::GASDSignature512.
- Note
- If you use this code in any academic work, please cite:
- J. Lima, V. Teichrieb. An Efficient Global Point Cloud Descriptor for Object Recognition and Pose Estimation. In Proceedings of the 29th SIBGRAPI - Conference on Graphics, Patterns and Images, Sao Jose dos Campos, Brazil, October 4-7 2016.
Voxar Labs, Centro de Informatica, Universidade Federal de Pernambuco, Brazil
Departamento de Estatistica e Informatica, Universidade Federal Rural de Pernambuco, Brazil
Member Typedef Documentation
◆ ConstPtr
| using pcl::GASDEstimation< PointInT, PointOutT >::ConstPtr = shared_ptr<const GASDEstimation<PointInT, PointOutT> > |
◆ Ptr
| using pcl::GASDEstimation< PointInT, PointOutT >::Ptr = shared_ptr<GASDEstimation<PointInT, PointOutT> > |
Constructor & Destructor Documentation
◆ GASDEstimation()
|
inline |
Constructor.
- Parameters
-
[in] view_direction view direction [in] shape_half_grid_size shape half grid size [in] shape_hists_size shape histograms size [in] shape_interp shape histograms interpolation method
Definition at line 89 of file gasd.h.
References pcl::Feature< PointInT, PointOutT >::feature_name_, pcl::Feature< PointInT, PointOutT >::k_, and pcl::Feature< PointInT, PointOutT >::search_radius_.
Member Function Documentation
◆ addSampleToHistograms()
|
protected |
add a sample to its respective histogram, optionally performing interpolation.
- Parameters
-
[in] p histogram sample [in] max_coord normalization factor with respect to axis-aligned bounding cube centered on the origin [in] half_grid_size half size of the regular grid used to compute the descriptor [in] interp interpolation method to be used while computing the descriptor [in] hbin histogram bin [in] hist_incr normalization factor of sample contribution [in,out] hists updated histograms
Definition at line 118 of file gasd.hpp.
References pcl::INTERP_NONE.
◆ compute()
| void pcl::GASDEstimation< PointInT, PointOutT >::compute | ( | PointCloudOut & | output | ) |
Overloaded computed method from pcl::Feature.
- Parameters
-
[out] output the resultant point cloud model dataset containing the estimated feature
Definition at line 50 of file gasd.hpp.
References pcl::PointCloud< PointT >::clear(), pcl::PointCloud< PointT >::header, pcl::PointCloud< PointT >::height, pcl::PointCloud< PointT >::is_dense, pcl::PointCloud< PointT >::resize(), and pcl::PointCloud< PointT >::width.
◆ computeFeature()
|
overrideprotectedvirtual |
Estimate GASD descriptor.
- Parameters
-
[out] output the resultant point cloud model dataset containing the GASD feature
Implements pcl::Feature< PointInT, PointOutT >.
Definition at line 253 of file gasd.hpp.
References pcl::getMaxDistance(), pcl::getMinMax3D(), and pcl::transformPointCloud().
◆ getTransform()
|
inline |
◆ setShapeHalfGridSize()
|
inline |
◆ setShapeHistsInterpMethod()
|
inline |
◆ setShapeHistsSize()
|
inline |
Set the shape histograms size.
If size is 1, then each histogram bin will store the number of points that belong to its correspondent cell in the 3D regular grid. If size > 1, then for each cell it will be computed a histogram of normalized distances between each sample and the cloud centroid
- Parameters
-
[in] shs shape histograms size
◆ setViewDirection()
|
inline |
Member Data Documentation
◆ hist_incr_
|
protected |
◆ max_coord_
|
protected |
◆ pos_
|
protected |
◆ shape_samples_
|
protected |
The documentation for this class was generated from the following files: