#include <pcl/surface/3rdparty/opennurbs/opennurbs_box.h>
|
| | ON_Box () |
| |
| | ON_Box (const ON_BoundingBox &bbox) |
| |
| | ~ON_Box () |
| |
| bool | IsValid () const |
| |
| bool | Create (const ON_BoundingBox &bbox) |
| |
| void | Destroy () |
| |
| ON_3dPoint | Center () const |
| |
| bool | GetCorners (ON_3dPoint *corners) const |
| |
| bool | GetCorners (ON_SimpleArray< ON_3dPoint > &corners) const |
| |
| ON_BoundingBox | BoundingBox () const |
| |
| ON_3dPoint | PointAt (double r, double s, double t) const |
| |
| bool | ClosestPointTo (ON_3dPoint point, double *r, double *s, double *t) const |
| |
| ON_3dPoint | ClosestPointTo (ON_3dPoint test_point) const |
| |
| bool | Rotate (double sin_angle, double cos_angle, const ON_3dVector &axis_of_rotation) |
| |
| bool | Rotate (double angle_radians, const ON_3dVector &axis_of_rotation) |
| |
| bool | Rotate (double sin_angle, double cos_angle, const ON_3dVector &axis_of_rotation, const ON_3dPoint ¢er_of_rotation) |
| |
| bool | Rotate (double angle_radians, const ON_3dVector &axis_of_rotation, const ON_3dPoint ¢er_of_rotation) |
| |
| bool | Translate (const ON_3dVector &) |
| |
| bool | Transform (const ON_Xform &) |
| |
| int | IsDegenerate (double tolerance=ON_UNSET_VALUE) const |
| |
| double | Volume () const |
| |
| double | Area () const |
| |
Definition at line 20 of file opennurbs_box.h.
◆ ON_Box() [1/2]
◆ ON_Box() [2/2]
◆ ~ON_Box()
◆ Area()
| double ON_Box::Area |
( |
| ) |
const |
◆ BoundingBox()
◆ Center()
◆ ClosestPointTo() [1/2]
| bool ON_Box::ClosestPointTo |
( |
ON_3dPoint |
point, |
|
|
double * |
r, |
|
|
double * |
s, |
|
|
double * |
t |
|
) |
| const |
◆ ClosestPointTo() [2/2]
◆ Create()
◆ Destroy()
◆ GetCorners() [1/2]
| bool ON_Box::GetCorners |
( |
ON_3dPoint * |
corners | ) |
const |
◆ GetCorners() [2/2]
◆ IsDegenerate()
| int ON_Box::IsDegenerate |
( |
double |
tolerance = ON_UNSET_VALUE | ) |
const |
◆ IsValid()
| bool ON_Box::IsValid |
( |
| ) |
const |
◆ PointAt()
| ON_3dPoint ON_Box::PointAt |
( |
double |
r, |
|
|
double |
s, |
|
|
double |
t |
|
) |
| const |
◆ Rotate() [1/4]
| bool ON_Box::Rotate |
( |
double |
angle_radians, |
|
|
const ON_3dVector & |
axis_of_rotation |
|
) |
| |
◆ Rotate() [2/4]
| bool ON_Box::Rotate |
( |
double |
angle_radians, |
|
|
const ON_3dVector & |
axis_of_rotation, |
|
|
const ON_3dPoint & |
center_of_rotation |
|
) |
| |
◆ Rotate() [3/4]
| bool ON_Box::Rotate |
( |
double |
sin_angle, |
|
|
double |
cos_angle, |
|
|
const ON_3dVector & |
axis_of_rotation |
|
) |
| |
◆ Rotate() [4/4]
| bool ON_Box::Rotate |
( |
double |
sin_angle, |
|
|
double |
cos_angle, |
|
|
const ON_3dVector & |
axis_of_rotation, |
|
|
const ON_3dPoint & |
center_of_rotation |
|
) |
| |
◆ Transform()
| bool ON_Box::Transform |
( |
const ON_Xform & |
| ) |
|
◆ Translate()
◆ Volume()
| double ON_Box::Volume |
( |
| ) |
const |
◆ dx
◆ dy
◆ dz
◆ plane
The documentation for this class was generated from the following file:
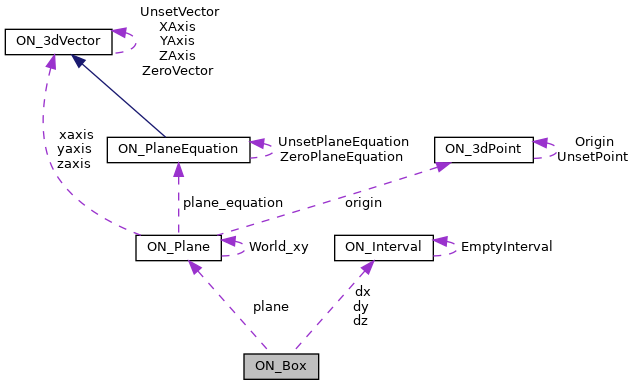
 Collaboration diagram for ON_Box:
Collaboration diagram for ON_Box: