Base Handler class for PointCloud colors. More...
#include <pcl/visualization/point_cloud_color_handlers.h>
 Inheritance diagram for pcl::visualization::PointCloudColorHandler< PointT >:
Inheritance diagram for pcl::visualization::PointCloudColorHandler< PointT >: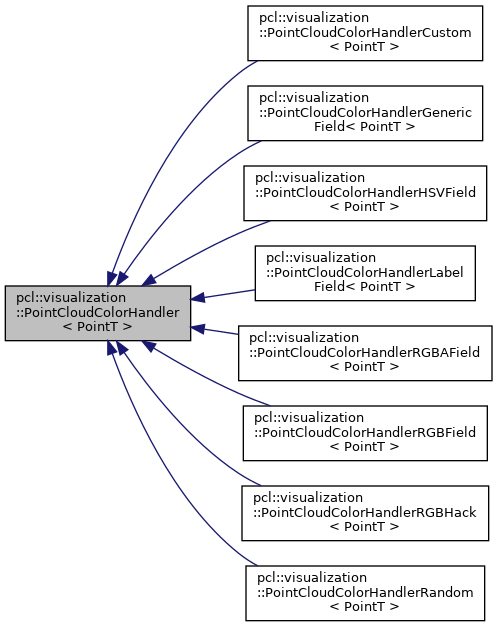 Collaboration diagram for pcl::visualization::PointCloudColorHandler< PointT >:
Collaboration diagram for pcl::visualization::PointCloudColorHandler< PointT >:
Public Types | |
| using | PointCloud = pcl::PointCloud< PointT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | Ptr = shared_ptr< PointCloudColorHandler< PointT > > |
| using | ConstPtr = shared_ptr< const PointCloudColorHandler< PointT > > |
Public Member Functions | |
| PointCloudColorHandler () | |
| Constructor. | |
| PointCloudColorHandler (const PointCloudConstPtr &cloud) | |
| Constructor. | |
| virtual | ~PointCloudColorHandler ()=default |
| Destructor. | |
| bool | isCapable () const |
| Check if this handler is capable of handling the input data or not. | |
| virtual std::string | getName () const =0 |
| Abstract getName method. | |
| virtual std::string | getFieldName () const =0 |
| Abstract getFieldName method. | |
| virtual vtkSmartPointer< vtkDataArray > | getColor () const =0 |
| Obtain the actual color for the input dataset as a VTK data array. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Set the input cloud to be used. | |
Protected Attributes | |
| PointCloudConstPtr | cloud_ |
| A pointer to the input dataset. | |
| bool | capable_ |
| True if this handler is capable of handling the input data, false otherwise. | |
| int | field_idx_ |
| The index of the field holding the data that represents the color. | |
| std::vector< pcl::PCLPointField > | fields_ |
| The list of fields available for this PointCloud. | |
Detailed Description
class pcl::visualization::PointCloudColorHandler< PointT >
Base Handler class for PointCloud colors.
Definition at line 65 of file point_cloud_color_handlers.h.
Member Typedef Documentation
◆ ConstPtr
| using pcl::visualization::PointCloudColorHandler< PointT >::ConstPtr = shared_ptr<const PointCloudColorHandler<PointT> > |
Definition at line 73 of file point_cloud_color_handlers.h.
◆ PointCloud
| using pcl::visualization::PointCloudColorHandler< PointT >::PointCloud = pcl::PointCloud<PointT> |
Definition at line 68 of file point_cloud_color_handlers.h.
◆ PointCloudConstPtr
| using pcl::visualization::PointCloudColorHandler< PointT >::PointCloudConstPtr = typename PointCloud::ConstPtr |
Definition at line 70 of file point_cloud_color_handlers.h.
◆ PointCloudPtr
| using pcl::visualization::PointCloudColorHandler< PointT >::PointCloudPtr = typename PointCloud::Ptr |
Definition at line 69 of file point_cloud_color_handlers.h.
◆ Ptr
| using pcl::visualization::PointCloudColorHandler< PointT >::Ptr = shared_ptr<PointCloudColorHandler<PointT> > |
Definition at line 72 of file point_cloud_color_handlers.h.
Constructor & Destructor Documentation
◆ PointCloudColorHandler() [1/2]
|
inline |
Constructor.
Definition at line 76 of file point_cloud_color_handlers.h.
◆ PointCloudColorHandler() [2/2]
|
inline |
Constructor.
Definition at line 81 of file point_cloud_color_handlers.h.
◆ ~PointCloudColorHandler()
|
virtualdefault |
Destructor.
Member Function Documentation
◆ getColor()
|
pure virtual |
Obtain the actual color for the input dataset as a VTK data array.
Deriving handlers should override this method.
- Returns
- smart pointer to VTK array if the operation was successful (the handler is capable and the input cloud was given), a null pointer otherwise
Implemented in pcl::visualization::PointCloudColorHandlerRGBHack< PointT >, pcl::visualization::PointCloudColorHandlerRandom< PointT >, pcl::visualization::PointCloudColorHandlerCustom< PointT >, pcl::visualization::PointCloudColorHandlerRGBField< PointT >, pcl::visualization::PointCloudColorHandlerHSVField< PointT >, pcl::visualization::PointCloudColorHandlerGenericField< PointT >, pcl::visualization::PointCloudColorHandlerRGBAField< PointT >, and pcl::visualization::PointCloudColorHandlerLabelField< PointT >.
Referenced by pcl::visualization::PCLVisualizer::updatePointCloud().
◆ getFieldName()
|
pure virtual |
Abstract getFieldName method.
Implemented in pcl::visualization::PointCloudColorHandlerRandom< PointT >, pcl::visualization::PointCloudColorHandlerCustom< PointT >, pcl::visualization::PointCloudColorHandlerRGBField< PointT >, pcl::visualization::PointCloudColorHandlerHSVField< PointT >, pcl::visualization::PointCloudColorHandlerRGBAField< PointT >, pcl::visualization::PointCloudColorHandlerLabelField< PointT >, and pcl::visualization::PointCloudColorHandlerGenericField< PointT >.
◆ getName()
|
pure virtual |
Abstract getName method.
Implemented in pcl::visualization::PointCloudColorHandlerRandom< PointT >, pcl::visualization::PointCloudColorHandlerCustom< PointT >, pcl::visualization::PointCloudColorHandlerRGBField< PointT >, pcl::visualization::PointCloudColorHandlerHSVField< PointT >, pcl::visualization::PointCloudColorHandlerRGBAField< PointT >, pcl::visualization::PointCloudColorHandlerLabelField< PointT >, and pcl::visualization::PointCloudColorHandlerGenericField< PointT >.
◆ isCapable()
|
inline |
Check if this handler is capable of handling the input data or not.
Definition at line 90 of file point_cloud_color_handlers.h.
References pcl::visualization::PointCloudColorHandler< PointT >::capable_.
◆ setInputCloud()
|
inlinevirtual |
Set the input cloud to be used.
- Parameters
-
[in] cloud the input cloud to be used by the handler
Reimplemented in pcl::visualization::PointCloudColorHandlerRGBField< PointT >, pcl::visualization::PointCloudColorHandlerGenericField< PointT >, pcl::visualization::PointCloudColorHandlerRGBAField< PointT >, and pcl::visualization::PointCloudColorHandlerLabelField< PointT >.
Definition at line 111 of file point_cloud_color_handlers.h.
References pcl::visualization::PointCloudColorHandler< PointT >::cloud_.
Referenced by pcl::visualization::PointCloudColorHandlerRGBField< PointT >::setInputCloud(), pcl::visualization::PointCloudColorHandlerGenericField< PointT >::setInputCloud(), pcl::visualization::PointCloudColorHandlerRGBAField< PointT >::setInputCloud(), and pcl::visualization::PointCloudColorHandlerLabelField< PointT >::setInputCloud().
Member Data Documentation
◆ capable_
|
protected |
True if this handler is capable of handling the input data, false otherwise.
Definition at line 123 of file point_cloud_color_handlers.h.
Referenced by pcl::visualization::PointCloudColorHandlerRGBHack< PointT >::getColor(), pcl::visualization::PointCloudColorHandler< PointT >::isCapable(), pcl::visualization::PointCloudColorHandlerCustom< PointT >::PointCloudColorHandlerCustom(), pcl::visualization::PointCloudColorHandlerCustom< PointT >::PointCloudColorHandlerCustom(), pcl::visualization::PointCloudColorHandlerHSVField< PointT >::PointCloudColorHandlerHSVField(), pcl::visualization::PointCloudColorHandlerLabelField< PointT >::PointCloudColorHandlerLabelField(), pcl::visualization::PointCloudColorHandlerRandom< PointT >::PointCloudColorHandlerRandom(), pcl::visualization::PointCloudColorHandlerRandom< PointT >::PointCloudColorHandlerRandom(), pcl::visualization::PointCloudColorHandlerRGBAField< PointT >::PointCloudColorHandlerRGBAField(), pcl::visualization::PointCloudColorHandlerRGBField< PointT >::PointCloudColorHandlerRGBField(), and pcl::visualization::PointCloudColorHandlerRGBHack< PointT >::PointCloudColorHandlerRGBHack().
◆ cloud_
|
protected |
A pointer to the input dataset.
Definition at line 118 of file point_cloud_color_handlers.h.
Referenced by pcl::visualization::PointCloudColorHandlerRGBHack< PointT >::getColor(), and pcl::visualization::PointCloudColorHandler< PointT >::setInputCloud().
◆ field_idx_
|
protected |
The index of the field holding the data that represents the color.
Definition at line 126 of file point_cloud_color_handlers.h.
Referenced by pcl::visualization::PointCloudColorHandlerHSVField< PointT >::PointCloudColorHandlerHSVField().
◆ fields_
|
protected |
The list of fields available for this PointCloud.
Definition at line 129 of file point_cloud_color_handlers.h.
Referenced by pcl::visualization::PointCloudColorHandlerHSVField< PointT >::PointCloudColorHandlerHSVField().
The documentation for this class was generated from the following file:
- pcl/visualization/point_cloud_color_handlers.h