RadiusOutlierRemoval filters points in a cloud based on the number of neighbors they have. More...
#include <pcl/filters/radius_outlier_removal.h>
 Inheritance diagram for pcl::RadiusOutlierRemoval< PointT >:
Inheritance diagram for pcl::RadiusOutlierRemoval< PointT >: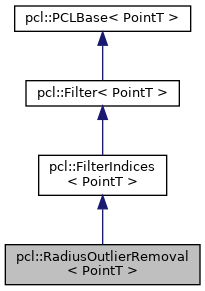 Collaboration diagram for pcl::RadiusOutlierRemoval< PointT >:
Collaboration diagram for pcl::RadiusOutlierRemoval< PointT >: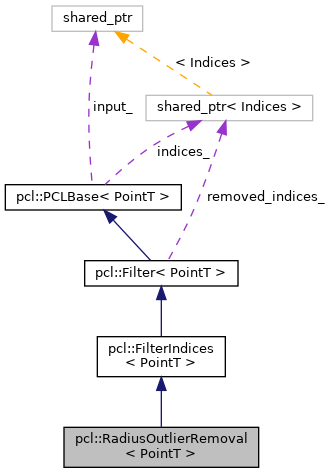
Public Types | |
| using | Ptr = shared_ptr< RadiusOutlierRemoval< PointT > > |
| using | ConstPtr = shared_ptr< const RadiusOutlierRemoval< PointT > > |
| Public Types inherited from pcl::FilterIndices< PointT > | |
| using | PointCloud = pcl::PointCloud< PointT > |
| using | Ptr = shared_ptr< FilterIndices< PointT > > |
| using | ConstPtr = shared_ptr< const FilterIndices< PointT > > |
| Public Types inherited from pcl::Filter< PointT > | |
| using | Ptr = shared_ptr< Filter< PointT > > |
| using | ConstPtr = shared_ptr< const Filter< PointT > > |
| using | PointCloud = pcl::PointCloud< PointT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| Public Types inherited from pcl::PCLBase< PointT > | |
| using | PointCloud = pcl::PointCloud< PointT > |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Public Member Functions | |
| RadiusOutlierRemoval (bool extract_removed_indices=false) | |
| Constructor. | |
| void | setRadiusSearch (double radius) |
| Set the radius of the sphere that will determine which points are neighbors. | |
| double | getRadiusSearch () const |
| Get the radius of the sphere that will determine which points are neighbors. | |
| void | setMinNeighborsInRadius (int min_pts) |
| Set the number of neighbors that need to be present in order to be classified as an inlier. | |
| int | getMinNeighborsInRadius () const |
| Get the number of neighbors that need to be present in order to be classified as an inlier. | |
| void | setSearchMethod (const SearcherPtr &searcher) |
| Provide a pointer to the search object. | |
| void | setNumberOfThreads (unsigned int nr_threads=0) |
| Set the number of threads to use. | |
| Public Member Functions inherited from pcl::FilterIndices< PointT > | |
| FilterIndices (bool extract_removed_indices=false) | |
| Constructor. | |
| void | filter (Indices &indices) |
| Calls the filtering method and returns the filtered point cloud indices. | |
| void | setNegative (bool negative) |
| Set whether the regular conditions for points filtering should apply, or the inverted conditions. | |
| bool | getNegative () const |
| Get whether the regular conditions for points filtering should apply, or the inverted conditions. | |
| void | setKeepOrganized (bool keep_organized) |
| Set whether the filtered points should be kept and set to the value given through setUserFilterValue (default: NaN), or removed from the PointCloud, thus potentially breaking its organized structure. | |
| bool | getKeepOrganized () const |
| Get whether the filtered points should be kept and set to the value given through setUserFilterValue (default = NaN), or removed from the PointCloud, thus potentially breaking its organized structure. | |
| void | setUserFilterValue (float value) |
| Provide a value that the filtered points should be set to instead of removing them. | |
| Public Member Functions inherited from pcl::Filter< PointT > | |
| Filter (bool extract_removed_indices=false) | |
| Empty constructor. | |
| IndicesConstPtr const | getRemovedIndices () const |
| Get the point indices being removed. | |
| void | getRemovedIndices (PointIndices &pi) |
| Get the point indices being removed. | |
| void | filter (PointCloud &output) |
| Calls the filtering method and returns the filtered dataset in output. | |
| Public Member Functions inherited from pcl::PCLBase< PointT > | |
| PCLBase () | |
| Empty constructor. | |
| PCLBase (const PCLBase &base) | |
| Copy constructor. | |
| virtual | ~PCLBase ()=default |
| Destructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PointCloudConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| virtual void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| virtual void | setIndices (std::size_t row_start, std::size_t col_start, std::size_t nb_rows, std::size_t nb_cols) |
| Set the indices for the points laying within an interest region of the point cloud. | |
| IndicesPtr | getIndices () |
| Get a pointer to the vector of indices used. | |
| IndicesConstPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
| const PointT & | operator[] (std::size_t pos) const |
| Override PointCloud operator[] to shorten code. | |
Protected Types | |
| using | PointCloud = typename FilterIndices< PointT >::PointCloud |
| using | PointCloudPtr = typename PointCloud::Ptr |
| using | PointCloudConstPtr = typename PointCloud::ConstPtr |
| using | SearcherPtr = typename pcl::search::Search< PointT >::Ptr |
Protected Member Functions | |
| void | applyFilter (Indices &indices) override |
| Filtered results are indexed by an indices array. | |
| void | applyFilterIndices (Indices &indices) |
| Filtered results are indexed by an indices array. | |
| Protected Member Functions inherited from pcl::FilterIndices< PointT > | |
| void | applyFilter (PointCloud &output) override |
| Abstract filter method for point cloud. | |
| Protected Member Functions inherited from pcl::Filter< PointT > | |
| const std::string & | getClassName () const |
| Get a string representation of the name of this class. | |
| Protected Member Functions inherited from pcl::PCLBase< PointT > | |
| bool | initCompute () |
| This method should get called before starting the actual computation. | |
| bool | deinitCompute () |
| This method should get called after finishing the actual computation. | |
Additional Inherited Members | |
| Protected Attributes inherited from pcl::FilterIndices< PointT > | |
| bool | negative_ {false} |
| False = normal filter behavior (default), true = inverted behavior. | |
| bool | keep_organized_ {false} |
| False = remove points (default), true = redefine points, keep structure. | |
| float | user_filter_value_ |
| The user given value that the filtered point dimensions should be set to (default = NaN). | |
| Protected Attributes inherited from pcl::Filter< PointT > | |
| IndicesPtr | removed_indices_ |
| Indices of the points that are removed. | |
| std::string | filter_name_ |
| The filter name. | |
| bool | extract_removed_indices_ |
| Set to true if we want to return the indices of the removed points. | |
| Protected Attributes inherited from pcl::PCLBase< PointT > | |
| PointCloudConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
Detailed Description
class pcl::RadiusOutlierRemoval< PointT >
RadiusOutlierRemoval filters points in a cloud based on the number of neighbors they have.
Iterates through the entire input once, and for each point, retrieves the number of neighbors within a certain radius. The point will be considered an outlier if it has too few neighbors, as determined by setMinNeighborsInRadius(). The radius can be changed using setRadiusSearch().
The neighbors found for each query point will be found amongst ALL points of setInputCloud(), not just those indexed by setIndices(). The setIndices() method only indexes the points that will be iterated through as search query points.
Usage example:
- See also
- StatisticalOutlierRemoval
Definition at line 73 of file radius_outlier_removal.h.
Member Typedef Documentation
◆ ConstPtr
| using pcl::RadiusOutlierRemoval< PointT >::ConstPtr = shared_ptr<const RadiusOutlierRemoval<PointT> > |
Definition at line 84 of file radius_outlier_removal.h.
◆ PointCloud
|
protected |
Definition at line 76 of file radius_outlier_removal.h.
◆ PointCloudConstPtr
|
protected |
Definition at line 78 of file radius_outlier_removal.h.
◆ PointCloudPtr
|
protected |
Definition at line 77 of file radius_outlier_removal.h.
◆ Ptr
| using pcl::RadiusOutlierRemoval< PointT >::Ptr = shared_ptr<RadiusOutlierRemoval<PointT> > |
Definition at line 83 of file radius_outlier_removal.h.
◆ SearcherPtr
|
protected |
Definition at line 79 of file radius_outlier_removal.h.
Constructor & Destructor Documentation
◆ RadiusOutlierRemoval()
|
inline |
Constructor.
- Parameters
-
[in] extract_removed_indices Set to true if you want to be able to extract the indices of points being removed (default = false).
Definition at line 90 of file radius_outlier_removal.h.
References pcl::Filter< PointT >::filter_name_.
Member Function Documentation
◆ applyFilter()
|
inlineoverrideprotectedvirtual |
Filtered results are indexed by an indices array.
- Parameters
-
[out] indices The resultant indices.
Implements pcl::FilterIndices< PointT >.
Definition at line 180 of file radius_outlier_removal.h.
References pcl::RadiusOutlierRemoval< PointT >::applyFilterIndices().
◆ applyFilterIndices()
|
protected |
Filtered results are indexed by an indices array.
- Parameters
-
[out] indices The resultant indices.
Definition at line 49 of file radius_outlier_removal.hpp.
References pcl::isXYZFinite(), pcl::search::many_knn_search, and pcl::search::radius_search.
Referenced by pcl::RadiusOutlierRemoval< PointT >::applyFilter().
◆ getMinNeighborsInRadius()
|
inline |
Get the number of neighbors that need to be present in order to be classified as an inlier.
The number of points within setRadiusSearch() from the query point will need to be equal or greater than this number in order to be classified as an inlier point (i.e. will not be filtered).
- Returns
- The minimum number of neighbors (default = 1).
Definition at line 136 of file radius_outlier_removal.h.
◆ getRadiusSearch()
|
inline |
Get the radius of the sphere that will determine which points are neighbors.
The number of points within this distance from the query point will need to be equal or greater than setMinNeighborsInRadius() in order to be classified as an inlier point (i.e. will not be filtered).
- Returns
- The radius of the sphere for nearest neighbor searching.
Definition at line 114 of file radius_outlier_removal.h.
◆ setMinNeighborsInRadius()
|
inline |
Set the number of neighbors that need to be present in order to be classified as an inlier.
The number of points within setRadiusSearch() from the query point will need to be equal or greater than this number in order to be classified as an inlier point (i.e. will not be filtered).
- Parameters
-
min_pts The minimum number of neighbors (default = 1).
Definition at line 125 of file radius_outlier_removal.h.
◆ setNumberOfThreads()
|
inline |
Set the number of threads to use.
- Parameters
-
nr_threads the number of hardware threads to use (0 sets the value back to automatic)
Definition at line 153 of file radius_outlier_removal.h.
◆ setRadiusSearch()
|
inline |
Set the radius of the sphere that will determine which points are neighbors.
The number of points within this distance from the query point will need to be equal or greater than setMinNeighborsInRadius() in order to be classified as an inlier point (i.e. will not be filtered).
- Parameters
-
[in] radius The radius of the sphere for nearest neighbor searching.
Definition at line 103 of file radius_outlier_removal.h.
◆ setSearchMethod()
|
inline |
Provide a pointer to the search object.
Calling this is optional. If not called, the search method will be chosen automatically.
- Parameters
-
[in] searcher a pointer to the spatial search object.
Definition at line 146 of file radius_outlier_removal.h.
The documentation for this class was generated from the following files:
- pcl/filters/radius_outlier_removal.h
- pcl/filters/impl/radius_outlier_removal.hpp