Base Handler class for PointCloud colors. More...
#include <pcl/visualization/point_cloud_color_handlers.h>
 Inheritance diagram for pcl::visualization::PointCloudColorHandler< pcl::PCLPointCloud2 >:
Inheritance diagram for pcl::visualization::PointCloudColorHandler< pcl::PCLPointCloud2 >: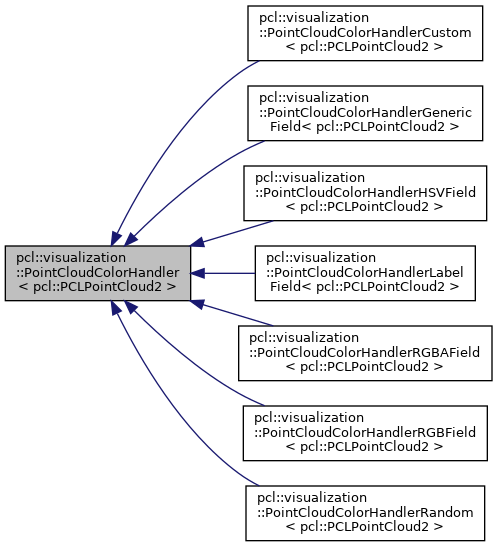 Collaboration diagram for pcl::visualization::PointCloudColorHandler< pcl::PCLPointCloud2 >:
Collaboration diagram for pcl::visualization::PointCloudColorHandler< pcl::PCLPointCloud2 >: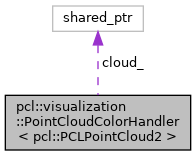
Public Types | |
| using | PointCloud = pcl::PCLPointCloud2 |
| using | PointCloudPtr = PointCloud::Ptr |
| using | PointCloudConstPtr = PointCloud::ConstPtr |
| using | Ptr = shared_ptr< PointCloudColorHandler< PointCloud > > |
| using | ConstPtr = shared_ptr< const PointCloudColorHandler< PointCloud > > |
Public Member Functions | |
| PointCloudColorHandler (const PointCloudConstPtr &cloud) | |
| Constructor. More... | |
| virtual | ~PointCloudColorHandler ()=default |
| Destructor. More... | |
| bool | isCapable () const |
| Return whether this handler is capable of handling the input data or not. More... | |
| virtual std::string | getName () const =0 |
| Abstract getName method. More... | |
| virtual std::string | getFieldName () const =0 |
| Abstract getFieldName method. More... | |
| virtual vtkSmartPointer< vtkDataArray > | getColor () const =0 |
| Obtain the actual color for the input dataset as a VTK data array. More... | |
| void | setInputCloud (const PointCloudConstPtr &cloud) |
| Set the input cloud to be used. More... | |
Protected Attributes | |
| PointCloudConstPtr | cloud_ |
| A pointer to the input dataset. More... | |
| bool | capable_ |
| True if this handler is capable of handling the input data, false otherwise. More... | |
| int | field_idx_ |
| The index of the field holding the data that represents the color. More... | |
Detailed Description
Base Handler class for PointCloud colors.
Definition at line 525 of file point_cloud_color_handlers.h.
Member Typedef Documentation
◆ ConstPtr
| using pcl::visualization::PointCloudColorHandler< pcl::PCLPointCloud2 >::ConstPtr = shared_ptr<const PointCloudColorHandler<PointCloud> > |
Definition at line 533 of file point_cloud_color_handlers.h.
◆ PointCloud
| using pcl::visualization::PointCloudColorHandler< pcl::PCLPointCloud2 >::PointCloud = pcl::PCLPointCloud2 |
Definition at line 528 of file point_cloud_color_handlers.h.
◆ PointCloudConstPtr
| using pcl::visualization::PointCloudColorHandler< pcl::PCLPointCloud2 >::PointCloudConstPtr = PointCloud::ConstPtr |
Definition at line 530 of file point_cloud_color_handlers.h.
◆ PointCloudPtr
| using pcl::visualization::PointCloudColorHandler< pcl::PCLPointCloud2 >::PointCloudPtr = PointCloud::Ptr |
Definition at line 529 of file point_cloud_color_handlers.h.
◆ Ptr
| using pcl::visualization::PointCloudColorHandler< pcl::PCLPointCloud2 >::Ptr = shared_ptr<PointCloudColorHandler<PointCloud> > |
Definition at line 532 of file point_cloud_color_handlers.h.
Constructor & Destructor Documentation
◆ PointCloudColorHandler()
|
inline |
Constructor.
Definition at line 536 of file point_cloud_color_handlers.h.
◆ ~PointCloudColorHandler()
|
virtualdefault |
Destructor.
Member Function Documentation
◆ getColor()
|
pure virtual |
Obtain the actual color for the input dataset as a VTK data array.
Deriving handlers should override this method. The default implementation is provided only for backwards compatibility with handlers that were written before PCL 1.10.0 and will be removed in future.
- Returns
- smart pointer to VTK array if the operation was successful (the handler is capable and the input cloud was given), a null pointer otherwise
Implemented in pcl::visualization::PointCloudColorHandlerLabelField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerRGBAField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerGenericField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerHSVField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerRGBField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerCustom< pcl::PCLPointCloud2 >, and pcl::visualization::PointCloudColorHandlerRandom< pcl::PCLPointCloud2 >.
◆ getFieldName()
|
pure virtual |
Abstract getFieldName method.
Implemented in pcl::visualization::PointCloudColorHandlerLabelField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerRGBAField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerGenericField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerHSVField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerRGBField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerCustom< pcl::PCLPointCloud2 >, and pcl::visualization::PointCloudColorHandlerRandom< pcl::PCLPointCloud2 >.
◆ getName()
|
pure virtual |
Abstract getName method.
Implemented in pcl::visualization::PointCloudColorHandlerLabelField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerRGBAField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerGenericField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerHSVField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerRGBField< pcl::PCLPointCloud2 >, pcl::visualization::PointCloudColorHandlerCustom< pcl::PCLPointCloud2 >, and pcl::visualization::PointCloudColorHandlerRandom< pcl::PCLPointCloud2 >.
◆ isCapable()
|
inline |
Return whether this handler is capable of handling the input data or not.
Definition at line 545 of file point_cloud_color_handlers.h.
◆ setInputCloud()
|
inline |
Set the input cloud to be used.
- Parameters
-
[in] cloud the input cloud to be used by the handler
Definition at line 568 of file point_cloud_color_handlers.h.
Member Data Documentation
◆ capable_
|
protected |
True if this handler is capable of handling the input data, false otherwise.
Definition at line 580 of file point_cloud_color_handlers.h.
◆ cloud_
|
protected |
A pointer to the input dataset.
Definition at line 575 of file point_cloud_color_handlers.h.
◆ field_idx_
|
protected |
The index of the field holding the data that represents the color.
Definition at line 583 of file point_cloud_color_handlers.h.
The documentation for this class was generated from the following file:
- pcl/visualization/point_cloud_color_handlers.h