#include </__w/1/s/gpu/octree/src/internal.hpp>
 Collaboration diagram for pcl::device::OctreeImpl:
Collaboration diagram for pcl::device::OctreeImpl: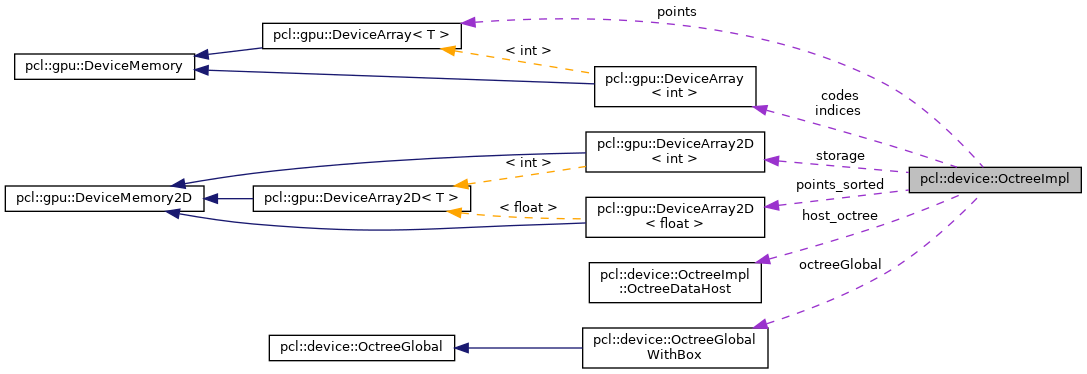
Classes | |
| struct | OctreeDataHost |
Public Types | |
| using | PointType = float4 |
| using | PointArray = DeviceArray< PointType > |
| using | PointCloud = PointArray |
| using | Queries = PointArray |
| using | Radiuses = DeviceArray< float > |
| using | BatchResult = DeviceArray< int > |
| using | BatchResultSizes = DeviceArray< int > |
| using | BatchResultSqrDists = DeviceArray< float > |
| using | Indices = DeviceArray< int > |
| using | NeighborIndices = pcl::gpu::NeighborIndices |
Public Member Functions | |
| OctreeImpl () | |
| void | setCloud (const PointCloud &input_points) |
| void | build () |
| void | radiusSearchHost (const PointType ¢er, float radius, std::vector< int > &out, int max_nn) const |
| void | approxNearestSearchHost (const PointType &query, int &out_index, float &sqr_dist) const |
| void | radiusSearch (const Queries &queries, float radius, NeighborIndices &results) |
| void | radiusSearch (const Queries &queries, const Radiuses &radiuses, NeighborIndices &results) |
| void | radiusSearch (const Queries &queries, const Indices &indices, float radius, NeighborIndices &results) |
| void | approxNearestSearch (const Queries &queries, NeighborIndices &results, BatchResultSqrDists &sqr_distance) const |
| void | nearestKSearchBatch (const Queries &queries, int k, NeighborIndices &results, BatchResultSqrDists &sqr_distances) const |
| void | internalDownload () |
Static Public Member Functions | |
| static void | get_gpu_arch_compiled_for (int &bin, int &ptr) |
Public Attributes | |
| PointCloud | points |
| DeviceArray2D< float > | points_sorted |
| DeviceArray< int > | codes |
| DeviceArray< int > | indices |
| OctreeGlobalWithBox | octreeGlobal |
| DeviceArray2D< int > | storage |
| struct pcl::device::OctreeImpl::OctreeDataHost | host_octree |
Detailed Description
Definition at line 68 of file internal.hpp.
Member Typedef Documentation
◆ BatchResult
| using pcl::device::OctreeImpl::BatchResult = DeviceArray<int> |
Definition at line 78 of file internal.hpp.
◆ BatchResultSizes
| using pcl::device::OctreeImpl::BatchResultSizes = DeviceArray<int> |
Definition at line 79 of file internal.hpp.
◆ BatchResultSqrDists
| using pcl::device::OctreeImpl::BatchResultSqrDists = DeviceArray<float> |
Definition at line 80 of file internal.hpp.
◆ Indices
| using pcl::device::OctreeImpl::Indices = DeviceArray<int> |
Definition at line 81 of file internal.hpp.
◆ NeighborIndices
Definition at line 83 of file internal.hpp.
◆ PointArray
Definition at line 72 of file internal.hpp.
◆ PointCloud
Definition at line 74 of file internal.hpp.
◆ PointType
| using pcl::device::OctreeImpl::PointType = float4 |
Definition at line 71 of file internal.hpp.
◆ Queries
Definition at line 75 of file internal.hpp.
◆ Radiuses
| using pcl::device::OctreeImpl::Radiuses = DeviceArray<float> |
Definition at line 77 of file internal.hpp.
Constructor & Destructor Documentation
◆ OctreeImpl()
|
inline |
Definition at line 87 of file internal.hpp.
Member Function Documentation
◆ approxNearestSearch()
| void pcl::device::OctreeImpl::approxNearestSearch | ( | const Queries & | queries, |
| NeighborIndices & | results, | ||
| BatchResultSqrDists & | sqr_distance | ||
| ) | const |
◆ approxNearestSearchHost()
| void pcl::device::OctreeImpl::approxNearestSearchHost | ( | const PointType & | query, |
| int & | out_index, | ||
| float & | sqr_dist | ||
| ) | const |
◆ build()
| void pcl::device::OctreeImpl::build | ( | ) |
◆ get_gpu_arch_compiled_for()
|
static |
◆ internalDownload()
| void pcl::device::OctreeImpl::internalDownload | ( | ) |
◆ nearestKSearchBatch()
| void pcl::device::OctreeImpl::nearestKSearchBatch | ( | const Queries & | queries, |
| int | k, | ||
| NeighborIndices & | results, | ||
| BatchResultSqrDists & | sqr_distances | ||
| ) | const |
◆ radiusSearch() [1/3]
| void pcl::device::OctreeImpl::radiusSearch | ( | const Queries & | queries, |
| const Indices & | indices, | ||
| float | radius, | ||
| NeighborIndices & | results | ||
| ) |
◆ radiusSearch() [2/3]
| void pcl::device::OctreeImpl::radiusSearch | ( | const Queries & | queries, |
| const Radiuses & | radiuses, | ||
| NeighborIndices & | results | ||
| ) |
◆ radiusSearch() [3/3]
| void pcl::device::OctreeImpl::radiusSearch | ( | const Queries & | queries, |
| float | radius, | ||
| NeighborIndices & | results | ||
| ) |
◆ radiusSearchHost()
| void pcl::device::OctreeImpl::radiusSearchHost | ( | const PointType & | center, |
| float | radius, | ||
| std::vector< int > & | out, | ||
| int | max_nn | ||
| ) | const |
◆ setCloud()
| void pcl::device::OctreeImpl::setCloud | ( | const PointCloud & | input_points | ) |
Member Data Documentation
◆ codes
| DeviceArray<int> pcl::device::OctreeImpl::codes |
Definition at line 108 of file internal.hpp.
◆ host_octree
| struct pcl::device::OctreeImpl::OctreeDataHost pcl::device::OctreeImpl::host_octree |
◆ indices
| DeviceArray<int> pcl::device::OctreeImpl::indices |
Definition at line 109 of file internal.hpp.
◆ octreeGlobal
| OctreeGlobalWithBox pcl::device::OctreeImpl::octreeGlobal |
Definition at line 111 of file internal.hpp.
◆ points
| PointCloud pcl::device::OctreeImpl::points |
Definition at line 104 of file internal.hpp.
◆ points_sorted
| DeviceArray2D<float> pcl::device::OctreeImpl::points_sorted |
Definition at line 107 of file internal.hpp.
◆ storage
| DeviceArray2D<int> pcl::device::OctreeImpl::storage |
Definition at line 114 of file internal.hpp.
The documentation for this class was generated from the following file:
- /__w/1/s/gpu/octree/src/internal.hpp