#include </__w/1/s/gpu/octree/include/pcl/gpu/octree/device_format.hpp>
 Collaboration diagram for pcl::gpu::NeighborIndices:
Collaboration diagram for pcl::gpu::NeighborIndices: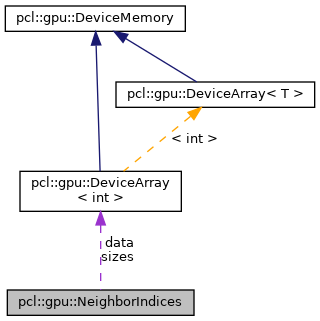
Public Member Functions | |
| NeighborIndices () | |
| NeighborIndices (int query_number, int max_elements) | |
| void | create (int query_number, int max_elements) |
| void | upload (const std::vector< int > &data, const std::vector< int > &sizes, int max_elements) |
| bool | validate (std::size_t cloud_size) const |
| operator PtrStep< int > () const | |
| std::size_t | neighboors_size () const |
Public Attributes | |
| DeviceArray< int > | data |
| DeviceArray< int > | sizes |
| int | max_elems |
Detailed Description
Definition at line 46 of file device_format.hpp.
Constructor & Destructor Documentation
◆ NeighborIndices() [1/2]
|
inline |
Definition at line 52 of file device_format.hpp.
◆ NeighborIndices() [2/2]
|
inline |
Definition at line 53 of file device_format.hpp.
References create().
Member Function Documentation
◆ create()
|
inline |
Definition at line 58 of file device_format.hpp.
References pcl::gpu::DeviceArray< T >::create(), data, max_elems, and sizes.
Referenced by NeighborIndices().
◆ neighboors_size()
|
inline |
Definition at line 84 of file device_format.hpp.
References data, max_elems, and pcl::gpu::DeviceArray< T >::size().
◆ operator PtrStep< int >()
|
inline |
Definition at line 79 of file device_format.hpp.
References data, max_elems, and pcl::gpu::DeviceArray< T >::ptr().
◆ upload()
|
inline |
Definition at line 67 of file device_format.hpp.
◆ validate()
|
inline |
Definition at line 74 of file device_format.hpp.
References data, max_elems, pcl::gpu::DeviceArray< T >::size(), and sizes.
Member Data Documentation
◆ data
| DeviceArray<int> pcl::gpu::NeighborIndices::data |
Definition at line 48 of file device_format.hpp.
Referenced by create(), pcl::gpu::extractLabeledEuclideanClusters(), neighboors_size(), operator PtrStep< int >(), upload(), and validate().
◆ max_elems
| int pcl::gpu::NeighborIndices::max_elems |
Definition at line 50 of file device_format.hpp.
Referenced by create(), neighboors_size(), operator PtrStep< int >(), upload(), and validate().
◆ sizes
| DeviceArray<int> pcl::gpu::NeighborIndices::sizes |
Definition at line 49 of file device_format.hpp.
Referenced by create(), pcl::gpu::extractEuclideanClusters(), pcl::gpu::extractLabeledEuclideanClusters(), upload(), and validate().
The documentation for this struct was generated from the following file:
- /__w/1/s/gpu/octree/include/pcl/gpu/octree/device_format.hpp