CropBox is a filter that allows the user to filter all the data inside of a given box. More...
#include <pcl/filters/crop_box.h>
 Inheritance diagram for pcl::CropBox< pcl::PCLPointCloud2 >:
Inheritance diagram for pcl::CropBox< pcl::PCLPointCloud2 >: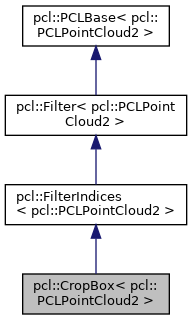 Collaboration diagram for pcl::CropBox< pcl::PCLPointCloud2 >:
Collaboration diagram for pcl::CropBox< pcl::PCLPointCloud2 >: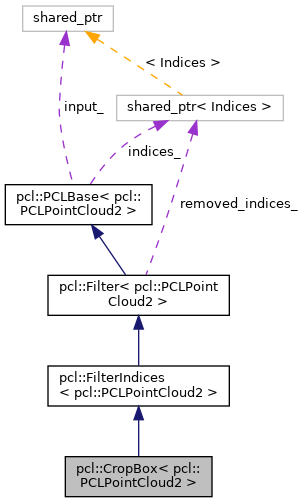
Public Member Functions | |
| PCL_MAKE_ALIGNED_OPERATOR_NEW | CropBox (bool extract_removed_indices=false) |
| Constructor. | |
| void | setMin (const Eigen::Vector4f &min_pt) |
| Set the minimum point of the box. | |
| Eigen::Vector4f | getMin () const |
| Get the value of the minimum point of the box, as set by the user. | |
| void | setMax (const Eigen::Vector4f &max_pt) |
| Set the maximum point of the box. | |
| Eigen::Vector4f | getMax () const |
| Get the value of the maxiomum point of the box, as set by the user. | |
| void | setTranslation (const Eigen::Vector3f &translation) |
| Set a translation value for the box. | |
| Eigen::Vector3f | getTranslation () const |
| Get the value of the box translation parameter as set by the user. | |
| void | setRotation (const Eigen::Vector3f &rotation) |
| Set a rotation value for the box. | |
| Eigen::Vector3f | getRotation () const |
| Get the value of the box rotatation parameter, as set by the user. | |
| void | setTransform (const Eigen::Affine3f &transform) |
| Set a transformation that should be applied to the cloud before filtering. | |
| Eigen::Affine3f | getTransform () const |
| Get the value of the transformation parameter, as set by the user. | |
| Public Member Functions inherited from pcl::FilterIndices< pcl::PCLPointCloud2 > | |
| FilterIndices (bool extract_removed_indices=false) | |
| Constructor. | |
| void | filter (Indices &indices) |
| Calls the filtering method and returns the filtered point cloud indices. | |
| void | setNegative (bool negative) |
| Set whether the regular conditions for points filtering should apply, or the inverted conditions. | |
| bool | getNegative () const |
| Get whether the regular conditions for points filtering should apply, or the inverted conditions. | |
| void | setKeepOrganized (bool keep_organized) |
| Set whether the filtered points should be kept and set to the value given through setUserFilterValue (default: NaN), or removed from the PointCloud, thus potentially breaking its organized structure. | |
| bool | getKeepOrganized () const |
| Get whether the filtered points should be kept and set to the value given through setUserFilterValue (default = NaN), or removed from the PointCloud, thus potentially breaking its organized structure. | |
| void | setUserFilterValue (float value) |
| Provide a value that the filtered points should be set to instead of removing them. | |
| Public Member Functions inherited from pcl::Filter< pcl::PCLPointCloud2 > | |
| Filter (bool extract_removed_indices=false) | |
| Empty constructor. | |
| IndicesConstPtr const | getRemovedIndices () const |
| Get the point indices being removed. | |
| void | getRemovedIndices (PointIndices &pi) |
| Get the point indices being removed. | |
| void | filter (PCLPointCloud2 &output) |
| Calls the filtering method and returns the filtered dataset in output. | |
| Public Member Functions inherited from pcl::PCLBase< pcl::PCLPointCloud2 > | |
| PCLBase () | |
| Empty constructor. | |
| virtual | ~PCLBase ()=default |
| destructor. | |
| void | setInputCloud (const PCLPointCloud2ConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| PCLPointCloud2ConstPtr const | getInputCloud () const |
| Get a pointer to the input point cloud dataset. | |
| void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| IndicesPtr const | getIndices () const |
| Get a pointer to the vector of indices used. | |
Protected Member Functions | |
| void | applyFilter (PCLPointCloud2 &output) override |
| Sample of point indices into a separate PointCloud. | |
| void | applyFilter (Indices &indices) override |
| Sample of point indices. | |
| Protected Member Functions inherited from pcl::Filter< pcl::PCLPointCloud2 > | |
| const std::string & | getClassName () const |
| Get a string representation of the name of this class. | |
| Protected Member Functions inherited from pcl::PCLBase< pcl::PCLPointCloud2 > | |
| bool | initCompute () |
| bool | deinitCompute () |
Protected Attributes | |
| Eigen::Vector4f | min_pt_ |
| The minimum point of the box. | |
| Eigen::Vector4f | max_pt_ |
| The maximum point of the box. | |
| Eigen::Vector3f | translation_ |
| The 3D translation for the box. | |
| Eigen::Vector3f | rotation_ |
| The 3D rotation for the box. | |
| Eigen::Affine3f | transform_ |
| The affine transform applied to the cloud. | |
| Protected Attributes inherited from pcl::FilterIndices< pcl::PCLPointCloud2 > | |
| bool | negative_ {false} |
| False = normal filter behavior (default), true = inverted behavior. | |
| bool | keep_organized_ {false} |
| False = remove points (default), true = redefine points, keep structure. | |
| float | user_filter_value_ |
| The user given value that the filtered point dimensions should be set to (default = NaN). | |
| Protected Attributes inherited from pcl::Filter< pcl::PCLPointCloud2 > | |
| IndicesPtr | removed_indices_ |
| Indices of the points that are removed. | |
| bool | extract_removed_indices_ |
| Set to true if we want to return the indices of the removed points. | |
| std::string | filter_name_ |
| The filter name. | |
| Protected Attributes inherited from pcl::PCLBase< pcl::PCLPointCloud2 > | |
| PCLPointCloud2ConstPtr | input_ |
| The input point cloud dataset. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
| std::vector< uindex_t > | field_sizes_ |
| The size of each individual field. | |
| index_t | x_idx_ |
| The x-y-z fields indices. | |
| index_t | y_idx_ |
| index_t | z_idx_ |
| std::string | x_field_name_ |
| The desired x-y-z field names. | |
| std::string | y_field_name_ |
| std::string | z_field_name_ |
Additional Inherited Members | |
| Public Types inherited from pcl::FilterIndices< pcl::PCLPointCloud2 > | |
| using | PCLPointCloud2 = pcl::PCLPointCloud2 |
| Public Types inherited from pcl::Filter< pcl::PCLPointCloud2 > | |
| using | Ptr = shared_ptr< Filter< pcl::PCLPointCloud2 > > |
| using | ConstPtr = shared_ptr< const Filter< pcl::PCLPointCloud2 > > |
| using | PCLPointCloud2 = pcl::PCLPointCloud2 |
| using | PCLPointCloud2Ptr = PCLPointCloud2::Ptr |
| using | PCLPointCloud2ConstPtr = PCLPointCloud2::ConstPtr |
| Public Types inherited from pcl::PCLBase< pcl::PCLPointCloud2 > | |
| using | PCLPointCloud2 = pcl::PCLPointCloud2 |
| using | PCLPointCloud2Ptr = PCLPointCloud2::Ptr |
| using | PCLPointCloud2ConstPtr = PCLPointCloud2::ConstPtr |
| using | PointIndicesPtr = PointIndices::Ptr |
| using | PointIndicesConstPtr = PointIndices::ConstPtr |
Detailed Description
CropBox is a filter that allows the user to filter all the data inside of a given box.
Definition at line 201 of file crop_box.h.
Constructor & Destructor Documentation
◆ CropBox()
|
inline |
Constructor.
- Parameters
-
[in] extract_removed_indices Set to true if you want to be able to extract the indices of points being removed (default = false).
Definition at line 216 of file crop_box.h.
Member Function Documentation
◆ applyFilter() [1/2]
|
overrideprotectedvirtual |
Sample of point indices.
- Parameters
-
indices the resultant point cloud indices
Implements pcl::FilterIndices< pcl::PCLPointCloud2 >.
◆ applyFilter() [2/2]
|
overrideprotectedvirtual |
Sample of point indices into a separate PointCloud.
- Parameters
-
output the resultant point cloud
Implements pcl::FilterIndices< pcl::PCLPointCloud2 >.
◆ getMax()
|
inline |
Get the value of the maxiomum point of the box, as set by the user.
- Returns
- the value of the internal max_pt parameter.
Definition at line 258 of file crop_box.h.
◆ getMin()
|
inline |
Get the value of the minimum point of the box, as set by the user.
- Returns
- the value of the internal min_pt parameter.
Definition at line 240 of file crop_box.h.
◆ getRotation()
|
inline |
Get the value of the box rotatation parameter, as set by the user.
Definition at line 290 of file crop_box.h.
◆ getTransform()
|
inline |
Get the value of the transformation parameter, as set by the user.
Definition at line 306 of file crop_box.h.
◆ getTranslation()
|
inline |
Get the value of the box translation parameter as set by the user.
Definition at line 274 of file crop_box.h.
◆ setMax()
|
inline |
Set the maximum point of the box.
- Parameters
-
[in] max_pt the maximum point of the box
Definition at line 249 of file crop_box.h.
◆ setMin()
|
inline |
Set the minimum point of the box.
- Parameters
-
[in] min_pt the minimum point of the box
Definition at line 231 of file crop_box.h.
◆ setRotation()
|
inline |
Set a rotation value for the box.
- Parameters
-
[in] rotation the (rx,ry,rz) values that the box should be rotated by
Definition at line 283 of file crop_box.h.
◆ setTransform()
|
inline |
Set a transformation that should be applied to the cloud before filtering.
- Parameters
-
[in] transform an affine transformation that needs to be applied to the cloud before filtering
Definition at line 299 of file crop_box.h.
◆ setTranslation()
|
inline |
Set a translation value for the box.
- Parameters
-
[in] translation the (tx,ty,tz) values that the box should be translated by
Definition at line 267 of file crop_box.h.
Member Data Documentation
◆ max_pt_
|
protected |
The maximum point of the box.
Definition at line 327 of file crop_box.h.
◆ min_pt_
|
protected |
The minimum point of the box.
Definition at line 325 of file crop_box.h.
◆ rotation_
|
protected |
The 3D rotation for the box.
Definition at line 331 of file crop_box.h.
◆ transform_
|
protected |
The affine transform applied to the cloud.
Definition at line 333 of file crop_box.h.
◆ translation_
|
protected |
The 3D translation for the box.
Definition at line 329 of file crop_box.h.
The documentation for this class was generated from the following file:
- pcl/filters/crop_box.h