Class for PFHRGB estimation. More...
#include </__w/1/s/gpu/features/include/pcl/gpu/features/features.hpp>
 Inheritance diagram for pcl::gpu::PFHRGBEstimation:
Inheritance diagram for pcl::gpu::PFHRGBEstimation: Collaboration diagram for pcl::gpu::PFHRGBEstimation:
Collaboration diagram for pcl::gpu::PFHRGBEstimation: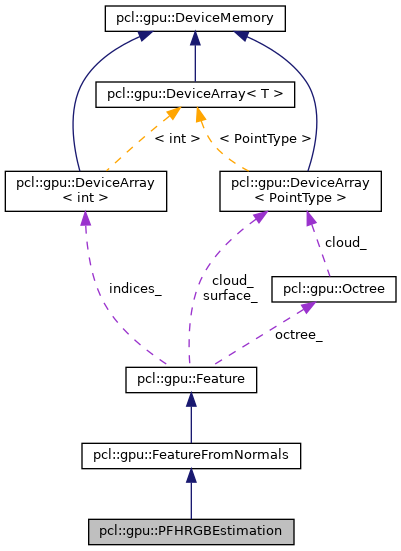
Public Types | |
| using | PointType = PointXYZ |
| Public Types inherited from pcl::gpu::Feature | |
| using | PointType = PointXYZ |
| using | NormalType = PointXYZ |
| using | PointCloud = DeviceArray< PointType > |
| using | Normals = DeviceArray< NormalType > |
| using | Indices = DeviceArray< int > |
Public Member Functions | |
| void | compute (const PointCloud &cloud, const Normals &normals, const NeighborIndices &neighb_indices, DeviceArray2D< PFHRGBSignature250 > &features) |
| void | compute (DeviceArray2D< PFHRGBSignature250 > &features) |
| Public Member Functions inherited from pcl::gpu::FeatureFromNormals | |
| void | setInputNormals (const Normals &normals) |
| Public Member Functions inherited from pcl::gpu::Feature | |
| Feature () | |
| void | setInputCloud (const PointCloud &cloud) |
| void | setSearchSurface (const PointCloud &surface) |
| void | setIndices (const Indices &indices) |
| void | setRadiusSearch (float radius, int max_results) |
Additional Inherited Members | |
| Protected Attributes inherited from pcl::gpu::FeatureFromNormals | |
| Normals | normals_ |
| Protected Attributes inherited from pcl::gpu::Feature | |
| PointCloud | cloud_ |
| PointCloud | surface_ |
| Indices | indices_ |
| float | radius_ |
| int | max_results_ |
| Octree | octree_ |
Detailed Description
Member Typedef Documentation
◆ PointType
Definition at line 130 of file features.hpp.
Member Function Documentation
◆ compute() [1/2]
| void pcl::gpu::PFHRGBEstimation::compute | ( | const PointCloud & | cloud, |
| const Normals & | normals, | ||
| const NeighborIndices & | neighb_indices, | ||
| DeviceArray2D< PFHRGBSignature250 > & | features | ||
| ) |
◆ compute() [2/2]
| void pcl::gpu::PFHRGBEstimation::compute | ( | DeviceArray2D< PFHRGBSignature250 > & | features | ) |
The documentation for this class was generated from the following file:
- /__w/1/s/gpu/features/include/pcl/gpu/features/features.hpp