Processor using multiple trees. More...
#include </__w/1/s/gpu/people/src/internal.h>
 Collaboration diagram for pcl::device::MultiTreeLiveProc:
Collaboration diagram for pcl::device::MultiTreeLiveProc: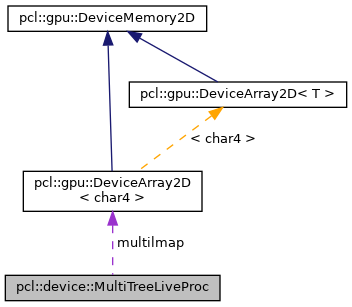
Public Member Functions | |
| MultiTreeLiveProc (int def_rows=480, int def_cols=640) | |
| Constructor with default values, allocates multilmap device memory. | |
| void | process (const Depth &dmap, Labels &lmap) |
| void | process (const Depth &dmap, Labels &lmap, int FGThresh) |
| same as process, but runs the trick of declaring as background any neighbor that is more than FGThresh away. | |
| void | processProb (const Depth &dmap, Labels &lmap, LabelProbability &prob, int FGThresh) |
| output a probability map from the RDF. | |
Public Attributes | |
| std::vector< CUDATree > | trees |
| MultiLabels | multilmap |
Detailed Description
Processor using multiple trees.
Definition at line 131 of file internal.h.
Constructor & Destructor Documentation
◆ MultiTreeLiveProc()
|
inline |
Constructor with default values, allocates multilmap device memory.
Definition at line 135 of file internal.h.
Member Function Documentation
◆ process() [1/2]
◆ process() [2/2]
same as process, but runs the trick of declaring as background any neighbor that is more than FGThresh away.
◆ processProb()
| void pcl::device::MultiTreeLiveProc::processProb | ( | const Depth & | dmap, |
| Labels & | lmap, | ||
| LabelProbability & | prob, | ||
| int | FGThresh | ||
| ) |
output a probability map from the RDF.
Member Data Documentation
◆ multilmap
| MultiLabels pcl::device::MultiTreeLiveProc::multilmap |
Definition at line 149 of file internal.h.
◆ trees
| std::vector<CUDATree> pcl::device::MultiTreeLiveProc::trees |
Definition at line 148 of file internal.h.
The documentation for this class was generated from the following file:
- /__w/1/s/gpu/people/src/internal.h